4 系统实现
系统硬件电路由主电路、驱动电路、过零点检测电路、采样电路、各种保护电路组成。过零点检测电路检测到过零信号,并把过零信号送到JK3单片机的捕捉口,JK3单片机接收到过零信号,由软件计算出延迟时间,并在延迟时间到后发出换相脉冲信号,经驱动电路转换为驱动信号去驱动各功率管,这样就实现了单片机对直流无刷电机的控制。保护电路主要有过电压充电保护,低水位保护。
系统软件采用模块化设计,包括初始化模块,PWM中断模块,捕捉中断模块,采样保护模块。PWM中断模块实现了无刷电机的步进起动,自由切换运行。PWM中断模块的流程图如图3所示。
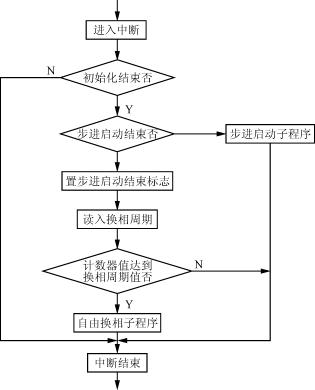
图3 PWM中断模块
初始化模块主要完成程序所用变量的初始化,PWM中断初始化,捕捉中断初始化,发初始定位脉冲;捕捉中断完成反电势过零点的捕捉及换相周期的确定;采样保护模块主要用来采集直流侧电压和电流,以及判定和处理故障。实验数据证明,换相时刻的准确性和相位跟踪的快速性对电机控制的性能影响极大,电子开关的准确换相点每次都在该相不激励绕组的反电势过零后30°的电角度位置,由于电机的运行是变速运行,换相周期是变化的,所以并不能准确确定延迟30°电角度的换相时间,只能根据前若干个换相周期的变化趋势,对该次换相时刻进行合理有效的滤波和预估,有数字滤波和锁相跟踪两种方式。
图4为系统正常运行时测得的线电压波形,毛刺部分是由PWM斩波和换相引起的。从图中可以看出,电压波形比较接近于理想情况,说明换相点准确,从而验证了对整个系统控制思想是正确的。
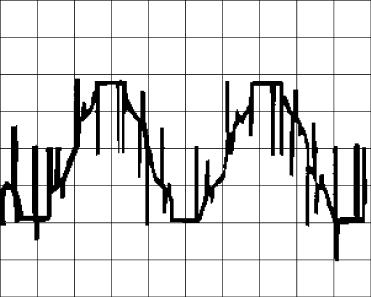
图4 相电压波形
5 结语
上述思想已经在500W太阳能光伏水泵系统中得到验证。系统起动时起动电流正常,步进起动结束后加速平稳。
 51/AVR单片机技术驿站! <
51/AVR单片机技术驿站! <



 最新评论
最新评论


 Alexa
Alexa mcusy_cn#126.com (请把#改成@)
mcusy_cn#126.com (请把#改成@)  交流:522422171
交流:522422171