�������
���ܹ����ť��������Ҫ����� 8031��Ƭ��ϵͳ�Ķ�ʱ���жϣ��б��ڹ�Ƭ����ת�������ת���ʡ�����ѵ�������ת����ʶ��
��ת����ʶ��ԭ��
�����Թ���շ����Ľ��ղ��ֽ���ΪA��B�����㣬���ڹ�Ƭ��תʱ����ͼ4��ʾ��
ͼ�У���A��B������Ϊ��e�����ڹ�Ƭ���ڹ�������Ϊ��d������ť����ʱʹ�ڹ�Ƭ���ڹ������Ⱥͷ��ڹ���������ȣ��ҡ�d�����ڡ�e�����ڹ�Ƭ��תʱ�����˶�ͼ��ɽ���Ϊ������ռ�ձ�Ϊ1��1�ľ������壨�������ڹ������������������������������ڹ�Ƭ���ͷ�����ƶ�ʱ����Ȼѭ�����ڣ�A��B����ȫ�ڱΣ�A δ�ڱζ�B���ڱ�����״̬�����ڹ�Ƭ�����ƶ�ʱ����ѭ�����ڣ�A��B����ȫ�ڱΣ�Bδ�ڱζ�A���ڱ�����״̬��
����շ����ն˴����ڱ�״̬ʱ������̬����������ߵ�ƽ����֮��������͵�ƽ�����ԣ���Ƭ��ֻ�趨ʱ�ɼ�����ĵ�ƽ��������A��B����ȫ�ڱΡ���Ϊ�о���ʼ�㣬Ȼ������Ƿ�����ų��֡�A δ�ڱζ�B���ڱΡ���B δ�ڱζ�A���ڱΡ�������״̬���ж�����ת����
��ת����ʶ��ԭ��
��ת���ʵ�ʶ��ʵ������ʶ��A��B��ȫ�ڱΡ��͡�A��B֮һδ�ڱΡ�������״̬ת����Ƶ�ʡ�ͬ�����������A��B����ȫ�ڱΡ���Ϊ�о���ʼ�㣬Ȼ������Ƿ�����ų��֡�A δ�ڱζ�B���ڱΡ���B δ�ڱζ�A���ڱΡ�������״̬֮һ����������״̬һ���֣�������������˲���һ�����źš�ͬʱ���Բ����������źż�����������ܸ����������������ʱ�䣬���ܵõ���ת���ʡ�
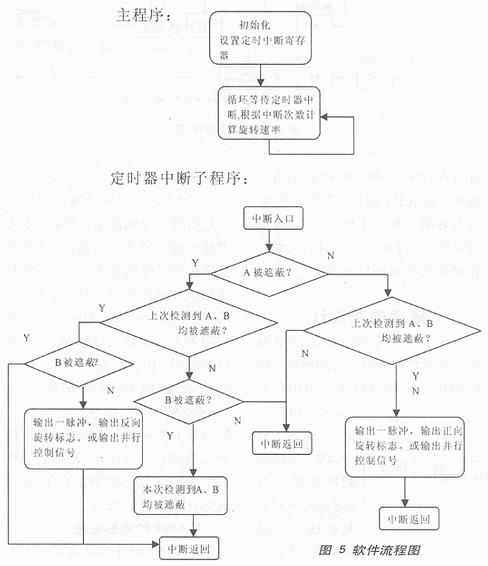
��������ͼ
�������ܹ����ť�������������ӣ���8031������Ա�д�ij����ܳ�������50����䡣��������ʾ��ͼ5��
����
�������ܹ����ť���䵥Ƭ��ϵͳ��Ӳ����ƺ���������������������ɡ����ԣ�����Ҫ�ڿ�������ϸ��Ӱ��������Һ����ʾ�ȹ���ʱ��ֻ����Ƹ��ӵĵ�Ƭ��ϵͳ��Χ��·���������ٵ�����Ƶ�Ƭ��ϵͳ��
�������ܹ����ť�����ɹ���Ŀǰ��Ӧ����һЩ�źŽ���豸�Ŀ�����塣�������ȶ����ɿ����ﵽ��ͬ���Ʒ��ˮƽ��
 51/AVR��Ƭ��������վ�� <
51/AVR��Ƭ��������վ�� <



 ��������
��������


 Alexa
Alexa mcusy_cn#126.com (���#�ij�@)
mcusy_cn#126.com (���#�ij�@)  ������522422171
������522422171