3.软件设计
该驱动器根据拨码开关KX、KY的不同组合有三种工作方式供选择:
方式1为中断方式:P3.5(INT1)为步进脉冲输入端,P3.7为正反转脉冲输入端。上位机(PC机或单片机)与驱动器仅以2条线相连。
方式2为串行通讯方式:上位机(PC机或单片机)将控制命令发送给驱动器,驱动器根据控制命令自行完成有关控制过程。
方式3为拨码开关控制方式:通过K1~K5的不同组合,直接控制步进电机。
当上电或按下复位键KR后,AT89C2051先检测拨码开关KX、KY的状态,根据KX、KY 的不同组合,进入不同的工作方式。以下给出方式1的程序流程框图与源程序。
在程序的编制中,要特别注意步进电机在换向时的处理。为使步进电机在换向时能平滑过渡,不至于产生错步,应在每一步中设置标志位。其中20H单元的各位为步进电机正转标志位;21H单元各位为反转标志位。在正转时,不仅给正转标志位赋值,也同时给反转标志位赋值;在反转时也如此。这样,当步进电机换向时,就可以上一次的位置作为起点反向运动,避免了电机换向时产生错步。
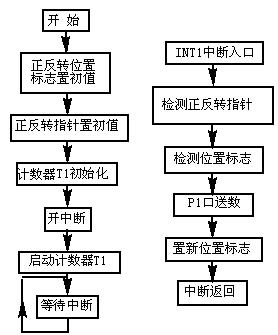
图4 方式1程序框图
方式1源程序:
MOV 20H,#00H ;20H单元置初值,电机正转位置指针
MOV 21H,#00H ;21H单元置初值,电机反转位置指针
MOV P1,#0C0H ;P1口置初值,防止电机上电短路
MOV TMOD,#60H ;T1计数器置初值,开中断
MOV TL1,#0FFH
MOV TH1,#0FFH
SETB ET1
SETB EA
SETB TR1
SJMP $
;***********计数器1中断程序************
IT1P: JB P3.7,FAN ;电机正、反转指针
;*************电机正转*****************
JB 00H,LOOP0
JB 01H,LOOP1
JB 02H,LOOP2
JB 03H,LOOP3
JB 04H,LOOP4
JB 05H,LOOP5
JB 06H,LOOP6
JB 07H,LOOP7
LOOP0: MOV P1,#0D0H
MOV 20H,#02H
MOV 21H,#40H
AJMP QUIT
LOOP1: MOV P1,#090H
MOV 20H,#04H
MOV 21H,#20H
AJMP QUIT
LOOP2: MOV P1,#0B0H
MOV 20H,#08H
MOV 21H,#10H
AJMP QUIT
LOOP3: MOV P1,#030H
MOV 20H,#10H
MOV 21H,#08H
AJMP QUIT
LOOP4: MOV P1,#070H
MOV 20H,#20H
MOV 21H,#04H
AJMP QUIT
LOOP5: MOV P1,#060H
MOV 20H,#40H
MOV 21H,#02H
AJMP QUIT
LOOP6: MOV P1,#0E0H
MOV 20H,#80H
MOV 21H,#01H
AJMP QUIT
LOOP7: MOV P1,#0C0H
MOV ; 20H,#01H
MOV 21H,#80H
AJMP QUIT
;***************电机反转*****************
FAN: JB 08H,LOOQ0
JB 09H,LOOQ1
JB 0AH,LOOQ2
JB 0BH,LOOQ3
JB 0CH,LOOQ4
JB 0DH,LOOQ5
JB 0EH,LOOQ6
JB 0FH,LOOQ7
LOOQ0: MOV P1,#0A0H
MOV 21H,#02H
MOV 20H,#40H
AJMP QUIT
LOOQ1: MOV P1,#0E0H
MOV 21H,#04H
MOV 20H,#20H
AJMP QUIT
LOOQ2: MOV P1,#0C0H
MOV 21H,#08H
MOV 20H,#10H
AJMP QUIT
LOOQ3: MOV P1,#0D0H
MOV 21H,#10H
MOV 20H,#08H
AJMP QUIT
LOOQ4: MOV P1,#050H
MOV 21H,#20H
MOV 20H,#04H
AJMP QUIT
LOOQ5: MOV P1,#070H
MOV 21H,#40H
MOV 20H,#02H
AJMP QUIT
LOOQ6: MOV P1,#030H
MOV 21H,#80H
MOV 20H,#01H
AJMP QUIT
LOOQ7: MOV P1,#0B0H
MOV 21H,#01H
MOV 20H,#80H
QUIT: RETI
END
4.结论
该驱动器经实验验证能驱动0.5N.m的步进电机。将驱动部分的电阻、电容及续流二极管的有关参数加以调整,可驱动1.2N.m的步进电机。该驱动器电路简单可靠,结构紧凑,对于I/O口线与单片机资源紧张的系统来说特别适用。
 51/AVR单片机技术驿站! <
51/AVR单片机技术驿站! <



 最新评论
最新评论


 Alexa
Alexa mcusy_cn#126.com (请把#改成@)
mcusy_cn#126.com (请把#改成@)  交流:522422171
交流:522422171