一、设计要求
设计一个超声波测距器,可以应用于汽车倒车、建筑施工工地以及一些工业现场的位置监控,也可用于如液位、井深、管道长度的测量等场合。要求测量范围在0.10-3.00m,测量精度1cm,测量时与被测物体无直接接触,能够清晰稳定地显示测量结果。
二、设计思路
超声波传感器及其测距原理
超声波是指频率高于20KHz的机械波。为了以超声波作为检测手段,必须产生超生波和接收超声波。完成这种功能的装置就是超声波传感器,习惯上称为超声波换能器或超声波探头。超声波传感器有发送器和接收器,但一个超声波传感器也可具有发送和接收声波的双重作用。超声波传感器是利用压电效应的原理将电能和超声波相互转化,即在发射超声波的时候,将电能转换,发射超声波;而在收到回波的时候,则将超声振动转换成电信号。
超声波测距的原理一般采用渡越时间法TOF(time
of flight)。首先测出超声波从发射到遇到障碍物返回所经历的时间,再乘以超声波的速度就得到二倍的声源与障碍物之间的距离。
测量距离的方法有很多种,短距离的可以用尺,远距离的有激光测距等,超声波测距适用于高精度的中长距离测量。因为超声波在标准空气中的传播速度为331.45米/秒,由单片机负责计时,单片机使用12.0M晶振,所以此系统的测量精度理论上可以达到毫米级。
由于超声波指向性强,能量消耗缓慢,在介质中传播距离远,因而超声波可以用于距离的测量。利用超声波检测距离,设计比较方便,计算处理也较简单,并且在测量精度方面也能达到要求。
超声波发生器可以分为两类:一类是用电气方式产生超声波,一类是用机械方式产生超声波。本课题属于近距离测量,可以采用常用的压电式超声波换能器来实现。
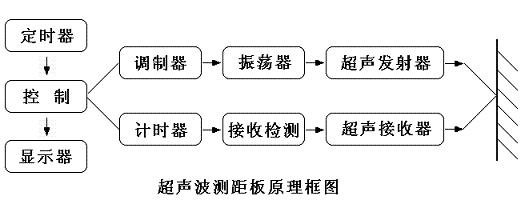
根据设计要求并综合各方面因素,可以采用AT89S51单片机作为主控制器,用动态扫描法实现LED数字显示,超声波驱动信号用单片机的定时器完成,超声波测距器的系统框图如下图所示:

三、系统组成
硬件部分
主要由单片机系统及显示电路、超声波发射电路和超声波检测接收电路三部分组成。采用AT89S51来实现对CX20106A红外接收芯片和TCT40-10系列超声波转换模块的控制。单片机通过P1.0引脚经反相器来控制超声波的发送,然后单片机不停的检测INT0引脚,当INT0引脚的电平由高电平变为低电平时就认为超声波已经返回。计数器所计的数据就是超声波所经历的时间,通过换算就可以得到传感器与障碍物之间的距离。
软件部分
主要由主程序、超声波发生子程序、超声波接收中断程序及显示子程序等部分。
四、系统硬件电路设计
1.单片机系统及显示电路
单片机采用89S51或其兼容系列。采用12MHz高精度的晶振,以获得较稳定的时钟频率,减小测量误差。单片机用P1.0端口输出超声波转化器所需的40KHz方波信号,利用外中断0口检测超声波接受电路输出的返回信号。显示电路采用简单实用的4位共阳LED数码管,段码用74LS244驱动,位码用PNP三极管驱动。单片机系统及显示电路如下图所示 :
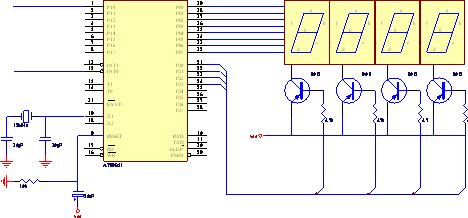
单片机及显示电路原理图
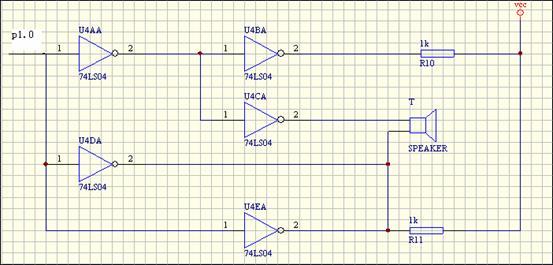
超声波发射电路原理图
2.超声波发射电路原理图参考期刊如图所示:
 51/AVR单片机技术驿站! <
51/AVR单片机技术驿站! <



 最新评论
最新评论


 Alexa
Alexa mcusy_cn#126.com (请把#改成@)
mcusy_cn#126.com (请把#改成@)  交流:522422171
交流:522422171