摘要:单片机的多机串行通信应用十分广泛,但在串行口被占用又要进行多机通信时就要采取其它措施。本文介绍了一种使用并口进行多机通信的方法,在实践中已得到验证。
关键词:MCU,并口通信
1. 问题的提出
某系统中使用了三路串行接口的传感器(GPS、压力和风向)及三路模拟电流(4~20mA)接口的传感器(湿度、温度和水位)。现需要将这些数据汇总后通过串口上传给PC机,并且要求每路信号数据都能够实时独立的接收。
2.系统设计
经过分析,我们分别使用一块2051单片机接收各路串口传感器的数据,同时使用一块多路高精度ADC对转换成电压的温度等信号采样,系统结构图如图1所示。主从机之间的具体管脚连接参见图2。
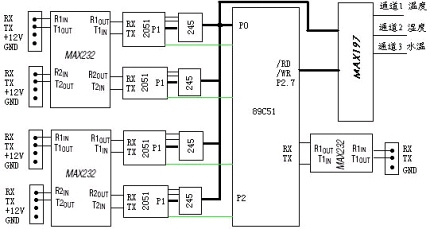
图1 系统结构框图
系统中51单片机作为主机控制着整个系统的动作并发起每次通信,每块2051作为实时从传感器获取数据并在主机控制下完成通信。主机和各从机之间通过并口连接通信。主从机工作流程如下:
・ 主机上电初始化后,通过P0口发送从机地址选中一路从机并等待应答。
・ 各从机上电初始化后接收传感器串行数据,然后通过P1口接收主机地址,当地址与自己相符后,调整245方向并由245向主机发送传感器数据,此过程由握手线负责控制。
・ 从机发送完所有数据后再次将245方向改为接收,重新开始接收传感器数据和主机发送的地址。
・ 主机按照同样方式接收所有各路2051数据。
・ 串口数据接收完毕后,主机控制AD转换并获取三路信号数据。
・ 主机将所有数据集合成规定格式后通过232发送给PC机。
主从机的工作流程图如图3所示:
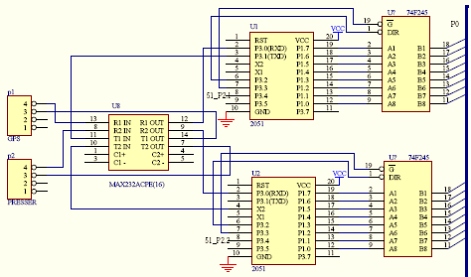
图2 主从机间的管脚连接
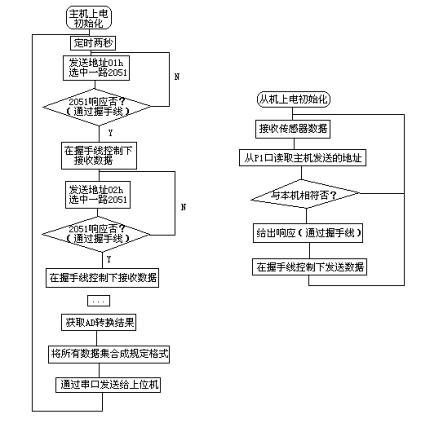
图3 主从机工作流程图
主要程序代码分别如下,主机为:
……
sbit adc_busy=P3^2;
sbit adc_hben=P3^3;
sbit hand1=P2^0;//GPS
sbit hand2=P2^1;//PRESSURE
sbit hand3=P2^2;//WIND
sbit hand4=P2^3;//BAK1
uchar idata gps[96];
uchar idata pressure[9];
uchar idata wind[26];
uchar idata tem[6];
uchar idata hum[6];
uchar idata water_tem[7];
……
P1=0x01;
for(i=0;i<96;i++){
while(hand1!=0);
gps[i]=P1;
while(hand1==0);
}
sendbyte2pc(’#’);
sendbyte2pc(’#’);
sendbyte2pc(’1’);
sendbyte2pc(’ ’);
sendbyte2pc(’ ’);
send2pc(gps,96);
……
从机为:
……
sbit dir=P3^2;
sbit en=P3^3;
sbit hand=P3^4;
……
loop:
RI=0;i=0;
while(!RI);//wait for receiving ready
if (SBUF!=0x40)//data head
goto loop;
data_str[i]=0x40;i++;
RI=0;
while(!RI);//wait for receiving ready
if (SBUF!=0x40)//data head
goto loop;
data_str[i]=0x40;i++;
do{
RI=0;
while(!RI);
data_str[i]=SBUF;
i++;
}
while(i!=96);
dir=0;en=0;//enable data receiving P1=0xff;
for(i=0;i<100;i++){
if(P1==0x01)
goto send;
}
en=1;
goto loop;
send:
for(i=0;i<96;i++){
dir=1;
P1=data_str[i];
hand=0;
for(j=0;j<5;j++){;}
hand=1;
}
en=1;dir=0;
goto loop;
……
3.结语
本文中提出的并行通信方法具有电路结构简单清晰、程序容易实现等特点,已经在实际中证明可行。在调试过程中可以借用串口助手等软件接收数据来验证通信的可靠性。
参考文献
[1] 王建校,王建国.51系列单片机及C51程序设计[M].北京:科学出版社,2002.
[2] 徐维祥,刘旭敏.单片机微型计算机原理及应用[M].大连:大连理工大学出版社,2002.7.
 51/AVR单片机技术驿站! <
51/AVR单片机技术驿站! <



 最新评论
最新评论


 Alexa
Alexa mcusy_cn#126.com (请把#改成@)
mcusy_cn#126.com (请把#改成@)  交流:522422171
交流:522422171