1 в§бдЕуеѓЯдЪОЪЧМЏЮЂЕчзгММЪѕЁЂМЦЫуЛњММЪѕЁЂаХЯЂДІРэгквЛЬхЕФаТаЭЯдЪОЗНЪНЁЃгЩгкЦфОпгаЩЋВЪЯЪбоЃЌЖЏЬЌЗЖЮЇЙуЃЌССЖШИпЃЌЪйУќГЄЃЌЙЄзїЮШЖЈПЩППЕШгХЕуЁЃФПЧАДѓЖрЪ§ЕФЙЋНЛГЕеаХЦЖМЪЧВЩгУЙЬЖЈЕФАхПщЯдЪОЃЌЯдЪОЕФаХЯЂСПЩйЃЌФкШнЙЬЖЈЃЌаоИФеОЕуаХЯЂБШНЯТщЗГЃЌВЛФмПьЫйЁЂБуНнЕФИќаТеОЕуаХЯЂЁЃБОЮФЬсГівЛжжЗНАИЃЌВЩгУLEDЕуеѓЯдЪОФЃПщЃЌПЫЗўСЫЩЯЪіШБЕуЃЌВЛНіПЩвдОВЬЌЕФЯдЪОЙЋНЛГЕеОЕуаХЯЂЃЌЖјЧввВПЩвдЭЈЙ§ЖЏЬЌЙіЖЏЃЌДгЖјдіМгаХЯЂЯдЪОЕФШнСПЁЃЮЊСЫабФПЃЌЛЙПЩвдВњЩњжюШчЩСЖЏЁЂЙіЖЏЕШЯдЪОаЇЙћЁЃ
1.1 ГЕФкЯдЪОЦїЕФЗЂеЙЯжзД
ЫцзХЕчзгММЪѕКЭМЦЫуЛњПижЦММЪѕдкПЭГЕЩЯЕФШевцЙуЗКЕФгІгУЃЌПЭГЕФкЕФТЗХЦЯдЪОЦївВОРњСЫДгЕЦЙтТЗХЦЁЂЗАхЪНЕчзгФЃПщТЗХЦЁЂCRTЯдЪОЁЂLCDвКОЇЯдЪОКЭLEDЕуеѓЯдЪОЕШМИжжЗЂеЙРраЭЃЛЯдЪОаХЯЂвВДгЙЬЖЈФкШнЗЂеЙЕНШЮвтФкШнЕФЖржжЯдЪОЗНЪНЃЛЖдЯдЪОаХЯЂЕФБрМЁЂаоИФЃЌвВгЩвЃПиМќХЬгаЯпЭЈбЖФЃЪНЗЂеЙЕНгУМЦЫуЛњБрМЮФзжЃЌдкОзЈгУЮоЯпПижЦЦїНЋЦфЗЂЩфЕНИїеОЕуЕФЭЈбЖФЃЪНЁЃвдКѓЕФЗЂеЙЧїЪЦЪЧЮРаЧЖЈЮЛЯЕЭГеОЕуЯдЪОЦїЃЌПЭГЕФкеОХЦЯдЪОЦїгЩЬьЯпЁЂЮРаЧЖЈЮЛФЃПщЁЂЮЂДІРэЦїЁЂLEDЕуеѓЧ§ЖЏЕчТЗЁЂLEDЕуеѓеОХЦКЭЕчПЩВСаДДцДЂЦїЙЙГЩЁЃ
ФПЧАдкПЭГЕФкЙуЗКЕФЯдЪОЦїгЩLEDЕуеѓЯдЪОЦїКЭLCDвКОЇЯдЪОЦїЃЌЛЙгаВПЗжCRTЯдЪОЦїЃЌгЩгкCRTЯдЪОЦїКФЕчСПЖрЁЂЬхЛ§НЯДѓЃЌЧвБОжЪСПНЯжиЃЌгыLEDЕуеѓЯдЪОЦїКЭLCDвКОЇЯдЪОЦїЯрБШЃЌвбДІгкЯТЗчЃЌФПЧАLEDКЭLCDЯдЪОЦїГЩЮЊЯжДњШЫУЧбЁдёжЎвЛЃЌЫќУЧИїгагХШБЕуЁЃLCDвКОЇЯдЪОЦїОпгаЭМЯёЧхЮњЁЂЬхЛ§аЁЁЂЙІКФЕЭЕШгХЕуЃЌЕЋЫќЕФГЩБОИпЁЂССЖШЕЭЁЂЪйУќЖЬЁЂПЩЪгОрРыКЭНЧЖШКмгаЯоЁЃЖјLEDЯдЪОЦСОпгаССЖШИпЁЂЙЪеЯЕЭЁЂФмКФЩйЁЂЪЙгУЪйУќГЄЁЂЯдЪОФкШнЖрбљЁЂЯдЪОЗНЪНЗсИЛЕШгХЕуЁЃ
1.2 LEDЕуеѓЯдЪОЯЕЭГ
ЕуеѓЯдЪОЪЧМЏЮЂЕчзгММЪѕЁЂМЦЫуЛњММЪѕЁЂаХЯЂДІРэгквЛЬхЕФаТаЭЯдЪОЗНЪНЁЃгЩгкЦфОпгаЩЋВЪЯЪбоЃЌЖЏЬЌЗЖЮЇЙуЃЌССЖШИпЃЌЪйУќГЄЃЌЙЄзїЮШЖЈПЩППЕШгХЕуЁЃФПЧАДѓЖрЪ§ЕФЙЋНЛГЕеаХЦЖМЪЧВЩгУЙЬЖЈЕФАхПщЯдЪОЃЌЯдЪОЕФаХЯЂСПЩйЃЌФкШнЙЬЖЈЃЌаоИФеОЕуаХЯЂБШНЯТщЗГЃЌВЛФмПьЫйЁЂБуНнЕФИќаТеОЕуаХЯЂЁЃБОЮФЬсГівЛжжЗНАИЃЌВЩгУLEDЕуеѓЯдЪОФЃПщЃЌПЫЗўСЫЩЯЪіШБЕуЃЌВЛНіПЩвдОВЬЌЕФЯдЪОЙЋНЛГЕеОЕуаХЯЂЃЌЖјЧввВПЩвдЭЈЙ§ЖЏЬЌЙіЖЏЃЌДгЖјдіМгаХЯЂЯдЪОЕФШнСПЁЃЮЊСЫабФПЃЌЛЙПЩвдВњЩњжюШчЩСЖЏЁЂЙіЖЏЕШЯдЪОаЇЙћЁЃ
ФПЧАLEDЯдЪОЦСЕФжжРрдНРДдНЖрЃЌДгЪЙгУГЁКЯМАССЖШПМТЧПЩЗжЮЊЪвФкгыЪвЭтЦСЃЌДгЩЈУшЗНЪНПЩЗжЮЊЖЏЬЌЩЈУшЯдЪОЦСКЭОВЬЌЩЈУшЯдЪОЦСЁЃЪвЭтЪЙгУЕФНЛЭЈгеЕМЦСЃЌЭЈГЃВЩгУМЦЫуЛњЭЌВНПижЦЕФОВЬЌЩЈУшЯдЪОЃЌУПИіЯёЫигЩМИИіИпССLEDЗЂЙтЙмзщГЩЃЌПЩзіГЩЖрЩЋЛђШЋЩЋЁЃЦфгХЕудкгкВЅЗХЕФФкШнаХЯЂСПДѓЃЌЪЕЪБадЧПЃЌЧвгЩгкВЩгУОВЬЌЯдЪОЃЌССЖШИпЃЛЦфШБЕуЪЧгВМўЕчТЗИДдгЃЌГЩБОИпЁЃЪвФкЪЙгУЕФгЩ8ЁС8LEDЕуеѓЦДГЩЕФЯдЪОЦСвВгаЭЌВНКЭвьВНжЎЗжЃЌЭЌВНПижЦЯдЪОЦСгЩМЦЫуЛњзїЮЊжїПиЦїЃЌвьВНПижЦЯдЪОЦСЕФжїПиЦїПЩВЩгУЕЅЦЌЛњЁЃЕЅЦЌЛњПижЦЕФЕЅЩЋЯдЪОЦСгЩгкНсЙЙМђЕЅЃЌГЩБОЕЭСЎЃЌЪЪКЯзїЮЊПЭГЕЙуИцЦСЁЃ
БОЮФНщЩмЕФПЭГЕЙуИцЦСЦСЯЕЭГЪЧжЧФмНЛЭЈЯЕЭГЕФвЛВПЗжЃЌЫќЪЧРћгУЯШНјЕФЯдЪОЁЂМАЭЈаХЕШММЪѕЪжЖЮЃЌЖЏЬЌЕиЁЂЪЕЪБЕиЯдЪОЙЋНЛГЕЕФеОЕуаХЯЂЃЌзюДѓЯоЖШЕФЬсИпЙЋНЛГЕеОХЦЕФаХЯЂЯдЪОСПЁЃБОЯЕЭГВЩгУЕФSTC89C516RD+(КъОЇПЦММ)ЕЅЦЌЛњЪЧаТвЛДњдіЧПаЭ8051ЕЅЦЌЛњБъзМЕФжЦЖЈепЃЌжТСІгкЬсЙЉТњзугУЛЇашЧѓЕФЪРНчМЖИпадФмЕЅЦЌЛњММЪѕЃЌдквЕФкДІгкСьЯШЕиЮЛЃЌЯњЪлЭјТчИВИЧШЋЙњЁЃдкБЃжЄжЪСПЕФЛљДЁЩЯЃЌвдМЋЕЭЕФМлИёКЭЭъЩЦЕФЗўЮёгЎЕУСЫгУЛЇЕФГЄЦкаХРЕЁЃдкЙуЪмЛЖгЕФSTC89C51ШЋЯЕСаЕЅЦЌЛњЕФЛљДЁЩЯЃЌЯжШЋСІЭЦГіЁА1ИіЪБжг/ЛњЦїжмЦкЁБЕФЕЅЦЌЛњ,ШЋУцЬсЩ§8051ЕЅЦЌЛњадФмЁЃгУИУЕЅЦЌЛњзїЮЊЯЕЭГЕФжабыПижЦЕЅдЊЃЌИКд№ВњЩњКЭПижЦЩЈУшаХКХЁЂЖСГіЯдЪОЛКГхЧјЕФЪ§ОнЫЭИјЩЈУшЧ§ЖЏЕчТЗЃЌЪЙLEDЕуеѓЦСАДеевЛЖЈЕФвЊЧѓЯдЪОЁЃИљОнЩшМЦвЊЧѓЃЌЯдЪОЗНЪНвЊОпгаЕєЕчДцДЂЙІФмЃЌвђДЫЃЌдкЕЅЦЌЛњЭтЮЇЕчТЗМгЩЯI2CзмЯпЕФEEPROMЃЌРћгУЕЅЦЌЛњЭтВПжаЖЯЙІФмМьВтГіРДЫљашвЊЕФЯдЪОЗНЪНЃЌВЂАбЫќДцДЂдкИУEEPROMФкЃЌетбљЃЌМДЪЙЖЯЕчЯдЪОЗНЪНвВШдШЛДцДЂдкИУEEPROMРяУцЃЌЕЅЦЌЛњдйжиаТЖСШЁИУEEPROMРяУцЕФФкШнЃЌвВОЭЪЧЖЯЕчЧАЕФЯдЪОЗНЪНЁЃНсКЯKEILШэМўБрГЬЃЌЪЕЯжСЫPCЛњЭЈаХЁЂПижЦНчУцвдМААВШЋДыЪЉЃЌДгЖјДѓДѓЗсИЛСЫЯЕЭГЙІФмЃЌЬсИпСЫЯЕЭГЕФПЩВйзїадЃЌЪЙДяЕННЛЛЅЪНгыжЧФмЛЏЃЌЗћКЯЮДРДНЛЭЈЯЕЭГжЧФмЛЏЁЂЭјТчЛЏЕФЗЂеЙЗНЯђЁЃРћгУИУЯЕЭГЃЌПЩвдЪЕЯжЭЌвЛеОХЦВЛЭЌЗНЯђПЭГЕеОЕуЕФОВЬЌЯдЪОЁЂЖЏЬЌЯдЪОКЭЖЈЪБЯдЪОПижЦЃЌСэЭтгУРДгІЖдНЛЭЈЭЛЗЂЪТМўЃЌзїЮЊгІМБИцЪОЃЌДяЕНЪшЩЂНЛЭЈЃЌБЃЛЄШЫУЧАВШЋЕФФПЕФЁЃ
ЩшМЦЪБПМТЧЕНЯЕЭГЕФРЉеЙМгЩЯЩ§МЖФЃПщЃЌПЩвдЪЕЯжЯЕЭГЕФдЖГЬЩ§МЖЃЛМгЩЯЙЋНЛГЕЕНеОЪБМфдЄВтФЃПщЃЌПЩвддЄВтЕНЙЋНЛГЕЕНеОЕФЪБМфЃЌЗНБуааШЫЃЛМгЩЯЭјТчФЃПщЃЌПЩвдСЌНгЛЅСЊЭјЃЌжБНгЭЈЙ§ЛЅСЊЭјНјааПижЦЃЌвВЮЊвдКѓЕФжЧФмНЛЭЈДђЯТЛљДЁЁЃ
2 LEDЕуеѓЯдЪОЕФРэТлЛљДЁ
LEDЕуеѓЯдЪОЕФЛљДЁРэТлАќРЈЙтЕчзгбЇЁЂАыЕМЬхЦїМўЁЂЪ§зжЕчзгЕчТЗЁЂДѓЙцФЃМЏГЩЕчТЗЁЂЕЅЦЌЛњМАЮЂЛњЕШИїИіЗНУцЃЌМШгагВМўгжгаШэМўЁЃЩЯЪіИїИіСьгђЖМгаздГЩЬхЯЕЃЌБОЮФЮоЗЈвЛвЛОЁЪіЃЌжЛФмвдЯдЪОЦСЮЊжїЯпНјааЬжТлЃЌжївЊВћЪіСЫLEDЦїМўЕФгІгУЛљДЁКЭЙЄзїдРэЃЌвдМАLEDЕуеѓФЃПщЕФЙЙГЩКЭЙЄзїдРэЁЃ
2.1 LEDЦїМўЕФгІгУЛљДЁ
LEDЦїМўжжРрЗБЖрЁЃдчЦкLEDВњЦЗЪЧЕЅИіЕФЗЂЙтЕЦЃЌЫцзХЪ§зжЛЏЩшБИЕФГіЯжЃЌLEDЪ§ТыЙмКЭзжЗћЙмЕУЕНСЫЙуЗКЕФгІгУЁЃ
LEDЗЂЙтЕЦПЩвдЗжЮЊЕЅЩЋЗЂЙтЕЦЁЂЫЋЩЋЗЂЙтЕЦЁЂШ§ЩЋЗЂЙтЕЦЁЂУцЗЂЙтЕЦЁЂЩСЫИЗЂЙтЕЦЁЂЕчбЙаЭЗЂЙтЕЦЕШЖржжРраЭЁЃАДееЗЂЙтЕЦЧПЖШгжПЩвдЗжЮЊЦеЭЈССЖШЗЂЙтЕЦЁЂИпССЖШЗЂЙтЕЦЕШЁЃ
LEDЗЂЙтЕЦЕФЭтаЮгЩPNНсЁЂбєМЋв§НХЁЂвѕМЋв§НХКЭЛЗбѕЪїжЌЗтзАЭтПЧзщГЩЁЃЦфКЫаФВПЗжЪЧОпгазЂШыИДКЯЗЂЙтЙІФмЕФPNНсЁЃЛЗбѕЪїжЌЗтзАЭтПЧГ§ОпгаБЃЛЄаОЦЌЕФзїгУЭтЃЌЛЙОпгаЭИЙтОлЙтЕФФмСІЃЌвддіЧПЯдЪОаЇЙћЁЃ
LEDЦїМўЭЈГЃгУЩщЛЏяиЃЈGaAsЃЉЁЂСзЛЏяиЃЈGaPЃЉЕШАыЕМЬхВФСЯжЦГЩЁЃЕБЯђLEDЦїМўЪЉМге§ЯђЕчбЙЪБЃЌЦїМўФкВПЕФЕчзггыПебЈжБНгИДКЯЖјВњЩњФмСПЃЌвдЙтЕФаЮЪНЪЭЗХГіРДЃЌВњЩњАыЕМЬхЗЂЙтЁЃвђДЫLEDЕФЧ§ЖЏОЭЪЧШчКЮЪЙЫќЕФPNНсДІгке§ЦЋзДЬЌЃЌЖјЧвЮЊСЫПижЦЫќЕФЗЂЙтЧПЖШЃЌЛЙвЊНтОіе§ЯђЕчСїЕФЕїНкЮЪЬтЁЃОпЬхЕФЧ§ЖЏЗНЗЈПЩвдЗжЮЊжБСїЧ§ЖЏЁЂКуСїЧ§ЖЏЁЂТіГхЧ§ЖЏКЭЩЈУшЧ§ЖЏЕШ[2]ЁЃ
2.2 LEDЕуеѓФЃПщ
ЯдЪОЕЅдЊЃЈDisplay unitЃЉгЩЕчТЗМААВзАНсЙЙШЗЖЈЕФВЂОпгаЯдЪОЙІФмЕФЦїМўзщГЩLEDЯдЪОЦСЕФзюаЁЕЅдЊЃЌвВНаЕуеѓЯдЪОФЃПщЁЃ
ЕуеѓЯдЪОЦСЪЧгЩЩЯЭђИіЛђМИЪЎЭђИіLEDЗЂЙтЖўМЋЙмзщГЩЃЌУПИіЗЂЙтЖўМЋЙмГЦЮЊвЛИіЯёЫиЁЃЮЊСЫШЁЕУСМКУЕФЯдЪОвЛжТадВЂМђЛЏЦїМўНсЙЙЃЌАЫЪЎФъДњвдРДГіЯжСЫзщКЯаЭLEDЕуеѓЯдЪОЦїЃЌвдЗЂЙтЖўМЋЙмЮЊЯёЫиЃЌЫќгУИпССЖШЗЂЙтЖўМЋЙмаОеѓСазщКЯКѓЃЌЛЗбѕЪїжЌКЭЫмФЃЗтзАЖјГЩЃЌМДЫљЮНЕФЕуеѓФЃПщЁЃЕуеѓФЃПщОпгаИпССЖШЁЂЙІКФЕЭЁЂв§НХЩйЁЂЪгНЧДѓЁЂЪйУќГЄЁЂФЭЪЊЁЂФЭРфШШЁЂФЭИЏЪДЕШЬиЕуЁЃАДеебеЩЋЕФВЛЭЌЗжЮЊЕЅЛљЩЋЁЂЫЋЛљЩЋКЭШ§ЛљЩЋШ§РрЃЌПЩЯдЪОКьЁЂЛЦЁЂТЬЁЂРЖЁЂГШЕШбеЩЋЁЃАДееЕуеѓЙцФЃДѓаЁЗжга4ЁС4ЁЂ4ЁС8ЁЂ5ЁС7ЁЂ5ЁС8ЁЂ8ЁС8ЁЂ16ЁС16ЁЂ24ЁС24ЁЂ32ЁС32ЁЂ40ЁС40ЕШЁЃАДееЯёЫиЕФжБОЖДѓаЁЗжгаІе3ЁЂІе3.75ЁЂІе5ЁЂІе10ЁЂІе20ЕШЁЃ
ЃЈaЃЉ ЭтВПНсЙЙ
ЃЈbЃЉ ФкВПНсЙЙ
ЭМ1 8ЁС8ЕуеѓНсЙЙ
ЭМ1ЮЊ8ЁС8ЕЅЛљЩЋЕуеѓЕФНсЙЙЭМЃЌДгФкВПНсЙЙПЩвдПДГі8ЁС8ЕуеѓЙВашвЊ64ИіЗЂЙтЖўМЋЙмЃЌЧвУПИіЗЂЙтЖўМЋЙмЪЧЗХжУдкИїааКЭСаЕФНЛВцЕуЩЯЁЃЕБЖдгІЕФФГвЛСажУИпЕчЦНЃЌСэвЛСажУЕЭЕчЦНЪБЃЌдђдкИУааКЭСаЕФНЛВцЕуЩЯЯргІЕФЖўМЋЙмОЭССЁЃ
LEDЯдЪОЦСОЭЪЧгЩШєИЩИіЕуеѓФЃПщзщГЩЕФЃЌЫќЭЈЙ§вЛЖЈЕФПижЦЗНЪНЃЌОЭПЩвдЯдЪОЮФзжЁЂЮФБОЁЂЭМаЮЁЂЭМЯёЁЂЖЏЛЕШИїжжаХЯЂЃЌвдМАЕчЪгЁЂТМЯёаХКХЁЃ
3 ЗНАИЩшМЦ
ДгЧАСННкЕФТлЪіжаПЩвдПДГіLEDЕуеѓЯдЪОММЪѕвбОЯрЕБГЩЪьЁЃЪЕЯжЗНАИЗЧГЃЖрЁЃБОЮФвЊЩшМЦЕФЪЧПЭГЕФкLEDЕуеѓЯдЪОЦСЃЌИљОнПЭГЕФкЕФЬиЪтЛЗОГЃЌбЁдёЗНАИЪБОЭвЊПМТЧЙЋНЛГЕЕФГЕЩэГпДчЁЂе№ЖЏЁЂЮТЖШЕШЖдЯдЪОЦСЕФгАЯьЃЌвдМАПЭГЕФкЕчдДЕФОжЯоадЃЌЮЊСЫНкдМЕчФмЃЌВЩгУЬЋбєФмЕчГиЙЉЕчЃЌОЭвЊЪЙЯдЪОЦСЙІКФНЕЕНзюЕЭЁЃ
3.1 ЯдЪОЗНАИ
ИљОнТлЮФЕФЩшМЦвЊЧѓЃЌБОЮФЬсГіСЫвдЯТМИжжЗНАИЃЌЖдБШТлжЄЃЌбЁШЁНЯКЯЪЪЕФЗНАИЁЃ
ЃЈ1ЃЉCRTМрЪгЦїЩшМЦЗНАИЃКдкеОХЦГіАВзАвЛаЁаЭВЪЩЋМрЪгЦСЃЌНЋеОЕуаХЯЂЯдЪОдкCRTМрЪгЦїЩЯЃЌЙЉааШЫВщдФЁЃеОЕуаХЯЂЗХдкДцДЂЦїФкЃЌЭЈЙ§ЮоЯпЙуВЅЕФЗНЪННјааЪ§ОнИќаТЁЃетжжЗНАИЕФгХЕуЃКЪЧГЩБОБШНЯЕЭЃЌПЩвдВЩгУЬдЬЯТРДЕФЕчЪгЛњзїЮЊМрЪгЦїЃЛШБЕуЪЧЃККФЕчСПОоДѓЃЌ CRTЯдЪОЦїдкбєЙтЯТЕФЯдЪОаЇЙћВЛРэЯыЁЃ
ЃЈ2ЃЉLEDЕуеѓЯдЪОЦСЩшМЦЗНАИЃКећИіеОХЦгЩLEDЯдЪОЦСЙЙГЩЃЌеОЕуаХЯЂдкЕуеѓЦСФЛЩЯЯдЪОЃЌВЂЧвПЩвдвдОВЬЌЕФЗНЪНЙЬЖЈЯдЪОеОЕуЛђепвдЖЏЬЌЕФЗНЪНТжСїЯдЪОЫљгаЕФеОЕуЁЃЯЕЭГЭЈЙ§RS485ЛђепЛЅСЊЭјНјааИќаТЁЂЩ§МЖЁЃетжжЗНАИЕФгХЕуЪЧЃКГЩБОЯрЖдБШНЯЕЭСЎЃЌФмМАЪБЖЏЬЌЕФЯдЪОеОЕуаХЯЂЃЌЯдЪОЕФаХЯЂШнСПвВБШНЯДѓЃЌБугкдЖГЬПижЦКЭЩ§МЖЁЃШБЕуЪЧЃКЪмФПЧАLEDЯдЪОММЪѕЕФЯожЦЃЌЖдгкЭМЯёКЭЪгЦЕЯдЪОЕФаЇЙћВЛЪЧКмРэЯыЁЃ
ЃЈ3ЃЉвКОЇЯдЪОЦїЃЈЛђепЕШРызгЃЉЩшМЦЗНАИЃКгЩвКОЇЃЈЕШРызгЃЉЯдЪОЦїЙЙГЩеОХЦЃЌВЛЕЋФмЯдЪОеОЕуаХЯЂЃЌЛЙПЩвдЯдЪОЭМЯѓЛђепЪгЦЕаХЯЂЃЌеОЕуаХЯЂОЙ§зЈгУЕчРТЛђепЛЅСЊЭјТчДЋЫЭЁЃетжжЗНАИЕФгХЕуЪЧФмдкгаЯоЕФеОХЦЩЯЯдЪОИќЖрЕФаХЯЂЃЌгШЦфЪЧЭМЯёКЭЪгЦЕаХЯЂЃЌШБЕуЪЧГЩБОЬЋИпЃЌЪ§ОнДЋЪфСПОоДѓЃЌВЛЪЪКЯЭЦЙуЪЙгУЁЃ
ЭЈЙ§БШНЯЩЯЪіШ§жжЗНАИЃЌПЩвдЗЂЯжLEDЕуеѓЯдЪОЗНАИгаКмДѓЕФПЩааадЃЌЖјЧвЦфЯЕЭГЕФЩ§МЖвВБШНЯЗНБуЃЌБугкЭЦЙуЪЙгУЃЌЪЪгІЯжДњЛЏНЈЩшЕФЗЂеЙашЧѓЁЃ
3.2 ПижЦЕчТЗЗНАИ
ПижЦЕчТЗгаСНжжбЁдёЃЌЪ§зжЕчТЗПижЦКЭCPLDПижЦЁЃ
Ъ§зжЕчТЗПижЦЕФдРэЪЧLEDЕуеѓЯдЪОЦСгЩЕЅЦЌЛњПижЦЕчТЗКЭЯдЪОЧ§ЖЏЕчТЗСНДѓВПЗжзщГЩЃЌвЛАуЕФЕЅЦЌЛњПижЦВПЗжВЩгУATMELЙЋЫОЕФ51ЯЕСаЕЅЦЌЛњЃЌПМТЧЕНЫќЕФROMЯрЖдНЯаЁЃЌетРяВЩгУдіЧПаЭЕФ51ЕЅЦЌЛњSTC89C516RD+(КъОЇПЦММ)ЕЅЦЌЛњЃЌЯдЪОЧ§ЖЏВПЗжгЩ16ЦЌ8ЁС8 LEDЕуеѓФЃПщКЭЯргІЕФЧ§ЖЏЕчТЗзщГЩЃЌЮЛТыЩЈУшаХКХКЭЖЮТыаХКХЖМгаЕЅЦЌЛњЬсЙЉЁЃ
гЩCPLDЦїМўзщГЩЕФПижЦЕчТЗЃЌОпгаКмИпЕФПЩППадКЭЩшМЦСщЛюадЃЌЫљЪЕЯжЕФЯдЪОаЇЙћбљЪННЯЖрЃЌЕЋВЩгУПЩБрГЬТпМЦїМўCPLDЕФЩшМЦГЩБОЯрЖдНЯИпЁЃ
гЩгкВЩгУгЩЕЅЦЌЛњзщГЩЕФПижЦЕчТЗвбФмЭъГЩЩшМЦЕФвЊЧѓЃЌЧвЦфадМлБШвЊгХгкВЩгУгЩCPLDзщГЩЕФПижЦЕчТЗЁЃвђДЫЃЌБОЮФВЩгУЧАепзїЮЊПижЦЕчТЗЁЃ
3.3 ЯЕЭГПђЭМ
ећИіЯЕЭГгЩСНДѓФЃПщзщГЩЃКжїПижЦЕЅдЊКЭИЈжњПижЦЕЅдЊФЃПщЁЃЦфПђЭМШчЯТЫљЪОЁЃ
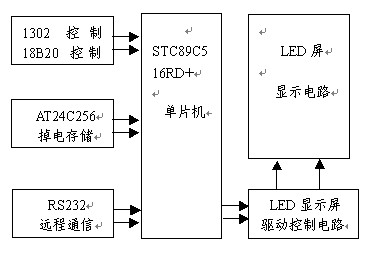
ЭМ2ЮЊжїПижЦЕЅдЊНсЙЙПђЭМЃЌЫќжївЊЭъГЩЕФЙІФмЪЧLEDЕуеѓЕФЯдЪОКЭЖЈЪБЯдЪОПижЦЁЃDS1302ЮЊЪБжгаОЦЌЃЌЮЊЯдЪОзМШЗЕФЪБМфЃЛ DS18B02ЪЧЮТЖШПижЦаОЦЌЃЌЯдЪОГЕФкЕФЮТЖШЃЛAT24C256ЪЧШнСПЮЊ256KbitЕФE2ROMЃЌгУРДБЃДцЩЈУшЗНЪНЕФЪ§ОнЕФаХЯЂЃЌвдМАЙуИцаХЯЂКЭИќаТЙуИцаХЯЂЕШЦфЫќД§ЯдЪОЕФаХЯЂЁЃRS232ЭЈаХФЃПщгУРДИќаТЯдЪОаХЯЂКЭЩ§МЖЯЕЭГЁЃ
4 ЯЕЭГгВМўЩшМЦ
4.1 ЯдЪОЦСЧ§ЖЏЯдЪОЕчТЗ
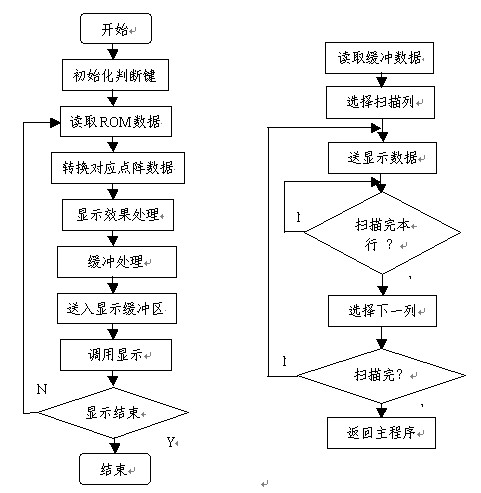
ЯдЪОЦСЗжГЩЦСЬхКЭПижЦЦїСНВПЗжЃЌЦСЬхЕФжївЊВПЗжЪЧЯдЪОеѓСавдМАгаааСаЧ§ЖЏЕчТЗЁЃИљОнАВзАЛЗОГЕФПеМфвдМАПМТЧГЩБОдьМлЃЌОіЖЈЪЙгУЖрДѓГпДчЕФЯдЪОЦСЃЌДгЖјОіЖЈСЫЯдЪОФЃПщЕФЪ§СПЃЌетРявд8ЁС8ЕуеѓЮЊР§ЃЌФЃПщЕЅЮЛЮЊ256ЕуеѓЃЌМДашвЊ16ПщЕуеѓФЃПщЃЌШчЭМ4ЪОЁЃККзжвЛАуЪЧ256ЕуеѓЃЌФЧУДИУЦСПЩвдвЛДЮЯдЪО4ИіККзжЁЃ
ВЩгУЩЈУшЗНЪННјааЯдЪОЪБЃЌЗжГЩСНВНЃЌЖдгкУПаагавЛИіааЧ§ЖЏЦїЃЌИїааЕФЭЌУћСаЙВгУвЛИіСаЧ§ЖЏЦїЃЌгЩЕЅЦЌЛњИјГіаабЁЭЈаХКХЃЌДгЕквЛааПЊЪМвРДЮЖдИїааНјааЩЈУшЃЌЖдгкСаЃЌИљОнИїСаЫљДцЪ§ОнЃЌШЗЖЈЯргІЕФСаЧ§ЖЏЦїЪЧЗёНЋИУСагыааНгЭЈЃЌШчЙћНгЭЈЃЌФЧУДИУааИУСаЕФLEDНЋССЃЌвдЭЌбљЗНЗЈНјааЯдЪОШЋВПИїааЖМЩЈУшвЛБщжЎКѓ(вЛИіЩЈУшжмЦк)ЃЌдйДгЕквЛааПЊЪМЃЌНјааЯТвЛИіжмЦкЕФЩЈУшЁЃжЛвЊвЛИіЩЈУшжмЦкЕФЪБМфБШШЫбл1/25УыЕФжЭСєЪБМфЖЬЃЌОЭВЛЛсИаОѕГіЩСЫИЯжЯѓЁЃ
ЯдЪОЪ§ОнДгЧ§ЖЏаОЦЌЕНЯдЪОФЃПщЪЧвдВЂааЗНЪНДЋЪфЕФЃЌЕЋЯдЪОЪ§ОнДгЕЅЦЌЛњЕНЧ§ЖЏаОЦЌЪЧвдДЎааЗНЪНДЋЪфЕФЃЌгЩгкДЎааДЋЪфЕФПижЦЕчТЗМђЕЅЃЌЩшМЦШнвзЃЌШБЕуЪЧДЎааЪ§ОнДЋЪфашвЊКмГЄЕФЪБМфЃЌВЛЙ§етПЩвдгЩШэМўРДУжВЙЃЌвВПЩПМТЧЕЅЦЌЛњЕФПижЦЫйЖШЁЃ
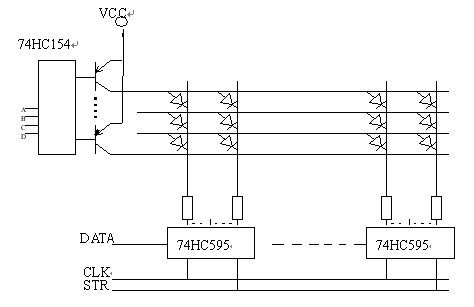
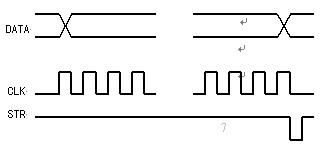
ЯдЪОЧ§ЖЏЕчТЗгЩ74HC595зщГЩЁЃ74HC595ЪфШыЖЫЪЧ8ЮЛДЎаавЦЮЛМФДцЦїЃЌЪфГіЖЫЪЧ8ЮЛВЂааЛКДцЦїОпгаЫјДцЙІФмЁЃгЩгкCLKЁЂLOADЖЫЯрСЌЃЌЖјЪ§ОнЯпЗжПЊЃЌетбљдкЭЌвЛТіГхЯТЃЌааСаЕФЪ§ОнПЩвдЭЌЪБНјааДЋШыЃЌааСаЪ§ОнзМБИКУКѓЃЌЦєЖЏLOADаХКХЪЙЫљгаЪ§ОнЭЌЪБЪфГіВЂЫјДцЃЌетбљЕФЩшМЦНЯжЎДЋЭГЗНЗЈЬсИпСЫ4БЖЕФЫйЖШЃЌеМгУI/OПкЩйЃЌгЩгкCLKЃЌ LOADв§ЯпНЯГЄЃЌЮЊБмУтЯпМфИЩШХЃЌдкЧ§ЖЏ6ЦЌ74Ls595жЎКѓдйМгЧ§ЖЏаОЦЌ74L5244вдЧ§ЖЏЯТвЛМЖЧ§ЖЏЕчТЗЁЃ
ааСаЩЈУшЧ§ЖЏЯрЕБгкЖдЗЂЙтЙмТіГхЙЉЕчЃЌвЊЛёЕУгыжБСїЧ§ЖЏЗНЪНЯрЕБЕФЗЂЙтЧПЖШЃЌТіГхЧ§ЖЏЕчСїЕФЦНОљЕчСїI1гыжБСїЕчСїI2ЯрЭЌЃЌЫќУЧгыТіГхЕчСїЗљжЕIfЕФЙиЯЕЮЊIf=Ton/ThЃЌЁСI1ЪЧЩЈУшжмЦкЃЌTonЪЧЕМЭЈЪБМфЃЌеМПеБШЪЧ1/16ЃЌЩЈУшЦЕТЪгІДѓгк24HZЃЌIШЁ8mAЃЌФЧУДI=8ЁС16=128mAЃЌЗЂЙтЙмбЙНЕШЁ2VЃЌФЧУДУПИіЗЂЙтЙмгІДЎНг50ЕФЕчзшЁЃааЧ§ЖЏзюДѓЫВМфЕчСїФмДяЕН128ЁС80=10.240AЁЃ
LEDЯдЪОЦСЧ§ЖЏЕчТЗЕФЩшМЦЃЌгыЫљгУПижЦЯЕЭГЯрХфКЯЃЌЭЈГЃЗжЮЊЖЏЬЌЩЈУшаЭЧ§ЖЏМАОВЬЌЫјДцаЭЧ§ЖЏЖўДѓРрЁЃвдЯТОЭЖЏЬЌЩЈУшаЭЧ§ЖЏЕчТЗЕФЩшМЦЮЊР§ЮЊНјааЗжЮіЃКЖЏЬЌЩЈУшаЭЧ§ЖЏЗНЪНЪЧжИЯдЪОЦСЩЯЕФ4ааЁЂ8ааЁЂ16ааЕШnааЗЂЙтЖўМЋЙмЙВгУвЛзщСаЧ§ЖЏМФДцЦїЃЌЭЈЙ§ааЧ§ЖЏЙмЕФЗжЪБЙЄзїЃЌЪЙЕУУПааLEDЕФЕуССЪБМфеМзмЪБМфЕФ1/nЃЌжЛвЊУПааЕФЫЂаТЫйТЪДѓгк50HzЃЌРћгУШЫблЕФЪгОѕднСєаЇгІЃЌШЫУЧОЭПЩвдПДЕНвЛЗљЭъећЕФЮФзжЛђЛУцЁЃГЃЙцаЭЧ§ЖЏЕчТЗЕФЩшМЦвЛАуЪЧгУДЎШыВЂГіЕФЭЈгУМЏГЩЕчТЗаОЦЌШч74HC595ЛђMC14094ЕШзїЮЊСаЪ§ОнЫјДцЃЌвд8050ЕШаЁЙІТЪNPNШ§МЋЙмЮЊааЧ§ЖЏЃЌЖјвдДяСжЖйШ§МЋЙмШчTIP127ЕШзїЮЊааЩЈУшЙмЁЃШчЖЏЬЌЩЈУшаЭЧ§ЖЏЗНЪНЪЧжИЯдЪОЦСЩЯЕФ4ааЁЂ8ааЁЂ16ааЕШnааЗЂЙтЖўМЋЙмЙВгУвЛзщСаЧ§ЖЏМФДцЦїЃЌЭЈЙ§ааЧ§ЖЏЙмЕФЗжЪБЙЄзїЃЌЪЙЕУУПааLEDЕФЕуССЪБМфеМзмЪБМфЕФ1/nЃЌжЛвЊУПааЕФЫЂаТЫйТЪДѓгк50HzЃЌРћгУШЫблЕФЪгОѕднСєаЇгІЃЌШЫУЧОЭПЩвдПДЕНвЛЗљЭъећЕФЮФзжЛђЛУцЁЃГЃЙцаЭЧ§ЖЏЕчТЗЕФЩшМЦвЛАуЪЧгУДЎШыВЂГіЕФЭЈгУМЏГЩЕчТЗаОЦЌШч74HC595ЛђMC14094ЕШзїЮЊСаЪ§ОнЫјДцЃЌвд8050ЕШаЁЙІТЪNPN
ЭМ3 ЯдЪОЧ§ЖЏЕчТЗ
Ш§МЋЙмЮЊСаЧ§ЖЏЃЌЖјвдДяСжЖйШ§МЋЙмШчTIP127ЕШзїЮЊааЩЈУшЙмЁЃШчвдЕЅЩЋЕуеѓЁЂ16ааЁС64СаЮЊвЛИіЛљБОЕЅдЊЃЌдђашгУ8ЦЌ74HC595ЁЂ16ИіааЩЈУшЙмЃЌЦфЙЄзїдРэЮЊЃКНЋАЫЦЌ74HC595МЖСЌЃЌЙВгУвЛИіДЎааЪБжгCLKМАЪ§ОнЫјДцаХКХSTRЁЃЕБЕквЛааашвЊЯдЪОЕФЪ§ОнОЙ§8ЁС8=64ИіCLKЪБжгКѓНЋШЋВПвЦШы74HC595жаЃЌДЫЪБВњЩњвЛИіЪ§ОнЫјДцаХКХSTRЃЌЪЙЪ§ОнЫјДцдк74HC595ЕФКѓМЖЫјДцЦїжаЃЌЭЌЪБгЩааЩЈУшПижЦЕчТЗВњЩњаХКХЪЙЕквЛааЩЈУшЙмЕМЭЈЃЌЯрЕБгкЕквЛааLEDЕФе§ЖЫЖМНгИпЦНЃЌЯдШЛЕквЛааLEDЙмзгЕФССЁЂУ№ШЁОігк74HC595жаЫљЫјДцЕФаХКХЃЛдкЕквЛааLEDЙмзгЕуССЕФЭЌЪБЃЌдк74HC595жавЦШыЕкЖўааашвЊЯдЪОЕФЪ§ОнЃЌЫцКѓНЋЦфЫјДцЃЌВЂЭЌЪБгЩааЩЈУшПижЦЕчТЗНЋЕквЛааЩЈУшЙмЙиБеЖјНгЭЈЕкЖўааЃЌЪЙЕкЖўааLEDЙмзгЕуССЁЁвдДЫРрЭЦЃЌЕБЕкЪЎСљааЩЈУшЙ§КѓдйЛиЕНЕквЛааЃЌжЛвЊЩЈУшЫйЖШзуЙЛИпЃЌОЭПЩаЮГЩвЛЗљЭъећЕФЮФзжЛђЭМЯёЃЌЦфЙЄзїЪБађМћЭМ4ЁЃ
ЭМ4 ДЎаавЦЮЛЙЄзїЪБађЭМ
4.2 ЯдЪОЦСжїПижЦЕчТЗ
дкПижЦСьгђ51ЯЕСаЁЂPICЯЕСавдМАAVRЯЕСаЕЅЦЌЛњЪЧГЃгУЕФЮЂаЭПижЦЦїЃЌУПИіЯЕСаЖМгаздМКЕФгХШБЕуЃЌдкФГаЉЗНУцЖМгаздМКЕФГЄДІЁЃдкОпЬхЕФЩшМЦЕБжавЊзлКЯПМТЧЃЌШчЕЅЦЌЛњЕФзЪдДЪЧЗёТњзуЯЕЭГвЊЧѓЃЌЯЕЭГЪЧЗёгабЯИёЕФЫйЖШвЊЧѓЃЌЯЕЭГЖдПижЦЦїЕФПЙИЩШХФмСІЃЌгВМўЕФМгУмадЃЌЭтЮЇЕчТЗЪЧЗёМђЕЅЃЌЪЧЗёгаБШНЯЦыШЋЕФГЩЪьЕФПЊЗЂЁЂЕїЪдЙЄОпЃЌШчЙћвЊЩњВњЕФЛАЃЌдђЛЙвЊПМТЧМлИёКЭЙЉЛѕЧўЕРЕШвђЫиЁЃ
4.2.1 ПижЦЦїЕФБШНЯМАбЁаЭ
PICЯЕСаЕЅЦЌЛњЃКPICЕЅЦЌЛњВЩгУОЋМђжИСюЪЙЦфжДаааЇТЪДѓЮЊЬсИпЁЃPICЯЕСа8ЮЛCMOSЕЅЦЌЛњОпгаЖРЬиЕФRISCНсЙЙЃЌЪ§ОнзмЯпКЭжИСюзмЯпЗжРыЕФЙўЗ№змЯпЃЈHarvardЃЉНсЙЙЃЌЪЙжИСюОпгаЕЅзжГЄЕФЬиадЃЌЧвдЪаэжИСюТыЕФЮЛЪ§ПЩЖргк8ЮЛЕФЪ§ОнЮЛЪ§ЃЌетгыДЋЭГЕФВЩгУCISCНсЙЙЕФ8ЮЛЕЅЦЌЛњЯрБШЃЌПЩвдДяЕН2:1ЕФДњТыбЙЫѕЃЌЫйЖШЬсИп4БЖЁЃPICгагХдНПЊЗЂЛЗОГЁЃPICдкЭЦГівЛПюаТаЭКХЕФЭЌЪБЭЦГіЯргІЕФЗТецаОЦЌЃЌЫљгаЕФПЊЗЂЯЕЭГгЩзЈгУЕФЗТецаОЦЌжЇГжЃЌЪЕЪБадЗЧГЃКУЁЃЦфв§НХОпгаЗРЫВЬЌФмСІЃЌЭЈЙ§ЯоСїЕчзшПЩвдНгжС220VНЛСїЕчдДЃЌПЩжБНггыМЬЕчЦїПижЦЕчТЗЯрСЌЃЌЮоаыЙтЕчёюКЯЦїИєРыЃЌИјгІгУДјРДМЋДѓЗНБуЁЃPICвдБЃУмШлЫПРДБЃЛЄДњТыЃЌгУЛЇдкЩеШыДњТыКѓШлЖЯШлЫПЃЌБ№ШЫдйвВЮоЗЈЖСГіЃЌГ§ЗЧЛжИДШлЫПЁЃФПЧАЃЌPICВЩгУШлЫПЩюТёЙЄвеЃЌЛжИДШлЫПЕФПЩФмадМЋаЁЁЃздДјПДУХЙЗЖЈЪБЦїЃЌПЩвдгУРДЬсИпГЬађдЫааЕФПЩППадЁЃ
AVRЯЕСаЕЅЦЌЛњЃКЪЧвЛжжаТаЭЕФЕЅЦЌЛњЁЃдЫааЫйЖШПьЃЌвЛИіЪБжгжмЦкжДаавЛЬѕжИСюЁЃгВМўгІгУЙўЗ№(Harvard)НсЙЙЃЌОпгадЄШЁжИСюЙІФмЃЌМДдкжДаавЛЬѕжИСюЪБЃЌдЄЯШАбЯТвЛЬѕжИСюШЁНјРДЃЌЪЙЕУжИСюПЩвддквЛИіЪБжгжмЦкФкжДааЁЃAVRЕЅЦЌЛњЪЧЖрРлМгЦїаЭЃЌЪ§ОнДІРэЫйЖШПьЁЃГЌЙІФмОЋМђжИСюЃЌОпга32ИіЭЈгУЙЄзїМФДцЦїЃЌЯрЕБгкга32ЬѕСЂНЛЧХЃЌПЩвдПьЫйЭЈааЁЃЯрЕБЖрЕФЕЅЦЌЛњжЛгавЛИіРлМгЦїЃЌОЭЯёвЛЬѕЖРФОЧХЃЌЫљгаЪТЖМвЊЭЈЙ§РлМгЦїЃЌЫйЖШТ§ЁЃAVRЕЅЦЌЛњЯЕСажага128BЁЋ4KBЕФSRAMОВЬЌЫцЛњЪ§ОнДцДЂЦїЃЌПЩСщЛюЪЙгУжИСюдЫЫуЁЂДцЗХЪ§ОнЃЌжаЖЯЯьгІЫйЖШПьЁЃAVRЯё8051вЛбљЃЌгаЖрИіЙЬЖЈжаЖЯЯђСПШыПкЕижЗЃЌПЩПьЫйЯьгІжаЖЯЁЃИпМЖCгябдБрГЬаЇТЪИпЁЃДгИпМЖгябдCДњТыЭъГЩЭЌвЛШЮЮёЪЕР§РДБШНЯЃЌ8 MHz AVRЕЅЦЌЛњЕФЫйЖШЯрЕБгк224 MHzЕФ80C51ЕЅЦЌЛњЃЌAVRБШ80C51Пь28БЖЁЃAVRЪЧЕЭЙІКФЕЅЦЌЛњЃЌОпгаанУпЪЁЕчЙІФм(Power Down)МАЯажУ(Idle)ЕЭЙІКФЙІФмЁЃвЛАуКФЕчдк1ЁЋ2.5 mAЃЛЖдгкЕфаЭЙІКФЧщПіЃЌWDTЙиБеЪБЮЊ100 nAЃЌИќЪЪгУгкЕчГиЙЉЕчЕФгІгУЩшБИЁЃгаЕФЦїМўзюЕЭ1.8 VМДПЩЙЄзїЁЃПЩЖрДЮЩеаДЕФFlashЃЌЧвОпгаЖржиУмТыБЃЛЄЫјЫР(Lock)ЙІФмЁЃI/OПкЙІФмЧПЁЂЧ§ЖЏФмСІДѓЃЌОпгаЪфШы/ЪфГіЁЂШ§ЬЌИпзшЪфШыЃЌвВПЩЩшЖЈФкВПРИпЕчзшзїЪфШыЖЫЕФЙІФмЃЌвдБугкгІгУЕНИїжжЫљашЕФГЁКЯ(ЖрЙІФмI/OПк)ЁЃ
51ЯЕСаЕЅЦЌЛњЃК51ЯЕСаЪЧжИЪЧМцШнIntelЙЋЫО51жИСюМЏЕФЕЅЦЌЛњЯЕСаЕФЭГУћГЦЁЃетжжЕЅЦЌЛњЫљАќРЈЕФгВМўзЪдДгаЃК
ЃЈ1ЃЉвЛИі8ЮЛЕФЮЂДІРэЦїЃЛ
ЃЈ2ЃЉЦЌФкЪ§ОнДцДЂЦїRAMЃЌгУвдДцЗХПЩвдЖС/аДЕФЪ§ОнЃЌШчдЫЫуЕФжаМфНсЙћЁЂзюжеНсЙћвдгћЯдЪОЕФЪ§ОнЕШЃЛ
ЃЈ3ЃЉЦЌФкГЬађДцДЂЦїROM/EPROMЃЌгУвдДцЗХГЬађЁЂвЛаЉдЪМЪ§ОнКЭБэИёЃЛ
ЃЈ4ЃЉЫФИі8ЮЛВЂааI/OНгПкP0ЁЋP3ЃЌУПИіПкПЩвдгУзїЪфШыЃЌвВПЩвдгУзїЪфГіЃЛ
ЃЈ5ЃЉСНИіЃЈЛђШ§ИіЃЉЖЈЪБЦї/МЦЪ§ЦїЃЌУПИіЖЈЪБЦї/МЦЪ§ЦїЖМПЩвдЩшжУГЩМЦЪ§ЗНЪНЃЌгУвдЖдЭтВПЪТМўНјааМЦЪ§ЃЌвВПЩвдЩшжУГЩЖЈЪБЗНЪНЃЌВЂПЩвдИљОнМЦЪ§ЛђЖЈЪБЕФНсЙћЪЕЯжМЦЫуЛњПижЦЃЛ
ЃЈ6ЃЉЮхЃЈЛђСљИіЃЉИіжаЖЯдДЕФжаЖЯПижЦЯЕЭГЃЛ
ЃЈ7ЃЉвЛИіШЋЫЋЙЄUARTНгПкЃЈЭЈгУвьВННгЪеЗЂЫЭЦїЃЉЕФДЎааI/OЃЌгУгкЪЕЯжЕЅЦЌЛњжЎМфЛђЕЅЦЌЛњгыЮЂЛњжЎМфЕФДЎааЭЈаХЃЛ
ЃЈ8ЃЉЦЌФкеёЕДЦїКЭЪБжгВњЩњЕчТЗЃЌЕЋЪЏгЂОЇЬхКЭЮЂЕїЕчШнаывЊЭтНгЁЃПЩвдПДГіMCS-51ЯЕСаЕЅЦЌЛњвВЪЧвЛПюЙІФмЧПДѓЕФЕЅЦЌЛњЁЃ
STC89C51RC/RD+ЯЕСаЕЅЦЌЛњЪЧКъОЇПЦММЭЦГіЕФаТвЛДњГЌЧППЙИЩШХ/ ИпЫй/ ЕЭЙІКФЕФЕЅЦЌЛњЃЌжИСюДњТыЭъШЋМцШнДЋЭГ 8051 ЕЅЦЌЛњЃЌ12 ЪБжг / ЛњЦїжмЦкКЭ6ЪБжг/ЛњЦїжмЦкПЩШЮвтбЁдёЃЌзюаТЕФDАцБОФкВПМЏГЩMAX810зЈгУИДЮЛЕчТЗЁЃ
ЬиЕуШчЯТЃК
ЃЈ1ЃЉ.діЧП6ЪБжг/ЛњЦїжмЦкЃЌ12ЪБжг/ЛњЦїжмЦк8051CPUЃЛ
ЃЈ2ЃЉЙЄзїЕчбЙЃК5.5V~3.4VЃЈ5VЕЅЦЌЛњЃЉ/3.8V~2.0VЃЈ3VЕЅЦЌЛњЃЉЃЛ
ЃЈ3ЃЉЙЄзїЦЕТЪЗЖЮЇЃК0~40MHzЃЌЯрЕБгкЦеЭЈ8051ЕФ0ЁЋ80MHzЪЕМЪЙЄзїЦЕТЪПЩДя48MHzЃЛ
ЃЈ4ЃЉгУЛЇгІгУГЬађПеМф4K/8K/13K/16K/20K/32K/64KзжНкЃЛ
ЃЈ5ЃЉЦЌЩЯМЏГЩ1280зжНк/512зжНкRAMЃЛ
ЃЈ6ЃЉЭЈгУI /OПкЃЈ32/36ИіЃЉИДЮЛКѓЮЊЃКP1/P2/P3/P4ЪЧзМЫЋЯђПк/ШѕЩЯРЃЈЦеЭЈ8 051ДЋЭГI /OПкЃЉЃЌP0ПкЪЧПЊТЉЪфГіЃЌзїЮЊзмЯпРЉеЙгУЪБЃЌВЛгУМгЩЯРЕчзшЃЌзїЮЊI /O ПкгУЪБЃЌашМгЩЯРЕчзшЃЛ
ЃЈ7ЃЉISPЃЈдкЯЕЭГПЩБрГЬЃЉ/IAPЃЈдкгІгУПЩБрГЬЃЉЃЌЮоашзЈгУБрГЬЦї/ЗТецЃЌПЩЭЈЙ§ДЎПкЃЈP3.0/P3.1ЃЉжБНгЯТдигУЛЇГЬађЃЌ8KГЬађ3УыМДПЩЭъГЩвЛЦЌЃЛ
ЃЈ8ЃЉEEPROMЙІФмЃЛ
ЃЈ9ЃЉПДУХЙЗЃЛ
ЃЈ10ЃЉФкВПМЏГЩ MAX810 зЈгУИДЮЛЕчТЗЃЈD АцБОВХгаЃЉЃЌЭтВПОЇЬх 20M вдЯТЪБЃЌПЩЪЁЭтВПИДЮЛЕчТЗЃЛ
ЃЈ11ЃЉЙВ3 Иі16ЮЛЖЈЪБЦї/МЦЪ§ЦїЃЌЦфжаЖЈЪБЦї0ЛЙПЩвдЕБГЩ2Иі8ЮЛЖЈЪБЦїЪЙгУЃЛ
ЃЈ12ЃЉЭтВПжаЖЯ4ТЗ,ЯТНЕбижаЖЯЛђЕЭЕчЦНДЅЗЂжаЖЯЃЌPower DownФЃЪНПЩгЩЭтВПжаЖЯЕЭЕчЦНДЅЗЂжаЖЯЗНЪНЛНабЃЛ
ЃЈ13ЃЉЭЈгУвьВНДЎааПкЃЈUARTЃЉЃЌЛЙПЩгУЖЈЪБЦїШэМўЪЕЯжЖрИіUARTЃЛ
ЃЈ14ЃЉЙЄзїЮТЖШЗЖЮЇЃК0~75Ёц/Ѓ40~+85ЁцЃЛ
ЃЈ15ЃЉЗтзАЃКPDIP-40ЃЌPLCC-44ЃЌPQFP-44ЁЃ
ДгвдЩЯМИжжаЭКХЕЅЦЌЛњЕФБШНЯжаПЩвдПДГіЃЌPICЕЅЦЌЛњЁЂAVRЕЅЦЌЛњЫфШЛдкКмЖрЗНУцЖМгаЦфЬиЕуЃЌШчдкдЫааЫйЖШЩЯЃЌФкВПзЪдДЕФХфжУЕШЁЃЕЋвђЦфМлИёИпЃЌПЊЗЂЙЄОпВЛМАЪЙгУ51ЯЕСаЕЅЦЌЛњЦыШЋЃЌдйПМТЧБОЯЕЭГЖдCPUЕФвЊЧѓВЂВЛЪЧКмИпЃЌзлКЯПМТЧЛЙЪЧбЁгУвбОЦеМАЕФ51ФкКЫЕФЕЅЦЌЛњЁЃ
4.2.2 EEPROMДцДЂЦїЕФбЁгУ
ЮЊСЫФмНЋЯЕЭГЫљЩшЖЈЕФГЃЪ§ЃЌШчИќаТЕФеОЕуаХЯЂЃЌЩшЖЈЕФЖЈЪБЯдЪОЪБМфдкЯЕЭГЕєЕчжЎКѓШдФмЛжИДЃЌдкЩшМЦЪББиаыПМТЧНЋГЃЪ§БЃДцЦ№РДЁЃгЩгкSTC89C516RD+ЕЅЦЌЛњЦЌФкУЛгаEEPROMЃЌаыВЩгУЭтВПРЉеЙЗНЪНЁЃдкЯЕЭГЕФЩшМЦЙ§ГЬжаЃЌЮЊСЫШЁЕУНЯДѓЕФЯЕЭГгрСПЃЌГЃВЩШЁДцДЂаОЦЌAT24C256ЃЌАДее16ЁС16ЕФЕуеѓРДЫуЃЌПЩвдДцДЂ1000ИізжЗћЃЌЖдгквЛИіПЭГЕЙуИцЦСЦСРДЫЕШнСПвбОзуЙЛЁЃ
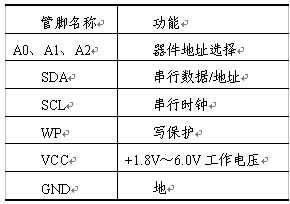
AT24C256НгПкВЩгУI2CзмЯпНгПкЗНЪНЁЃI2CзмЯпЪЧвЛжжгУгкICЦїМўжЎМфСЌНгЕФЖўЯпжЦзмЯпЁЃСЌНгзмЯпЕФЦїМўЕФЪфГіБиаыЪЧМЏЕчМЋЛђТЉМЋПЊТЗЃЌвдОпгаЯпЁАгыЁБЙІФмЁЃI2CзмЯпЕФЪ§ОнДЋЫЭЫйТЪдкБъзМЙЄзїЗНЪНЯТЮЊ100kbit/sЃЌдкПьЫйЗНЪНЯТЃЌзюИпДЋЫЭЫйТЪПЩДя400kbit/sЁЃЫќЭЈЙ§SDAЃЈДЎааЪ§ОнЯпЃЉМАSCLЃЈДЎааЪБжгЯпЃЉСНИљЯпКЭСЌдкзмЯпЩЯЕФЩЯЮЛЛњНјааЭЈаХЃЌВЂИљОнЕижЗЪЖБ№УПИіЦїМўЁЃВЩгУI2CзмЯпБъзМЕФЕЅЦЌЛњЛђICЦїМўЃЌЦфФкВПВЛНігаI2CНгПкЕчТЗЃЌЖјЧвНЋФкВПИїЕЅдЊЕчТЗАДЙІФмЛЎЗжЮЊШєИЩЯрЖдЖРСЂЕФФЃПщЃЌЭЈЙ§ШэМўбАжЗЪЕЯжЦЌбЁЃЌМѕЩйСЫЦїМўЦЌбЁЯпЕФСЌНгЁЃCPUВЛНіФмЭЈЙ§жИСюНЋФГИіЙІФмЕЅдЊЕчТЗЙвППЛђеЊРызмЯпЃЌЛЙПЩЖдИУЕЅдЊЕФЙЄзїзДПіНјааМьВтЃЌДгЖјЪЕЯжЖдгВМўЯЕЭГМШМђЕЅгжСщЛюЕФРЉеЙгыПижЦЁЃ
Бэ1 24C256ЕФЙмНХНщЩм
4.2.3 ПижЦЕЅдЊКЭДцДЂЕЅдЊЕчТЗ
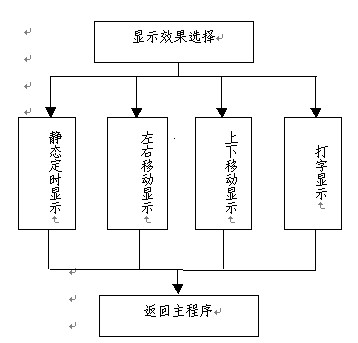
гУPCЛњЪЕЯжЕФжївЊЙІФмАќРЈЕЅЦЌЛњЯдЪОзгЯЕЭГЕФ(бЁдёЯдЪОЗНЪНбЁдёЃЌАќРЈОВЬЌЁЂЩСЖЏЁЂЙіЖЏЁЂДђзжЕШ)ЃЌЙіЖЏЗНЯђбЁдёЃЈАќРЈЩЯЯТЙіЖЏКЭзѓгвЙіЖЏЃЉЃЌЖЏЬЌЯдЪОЫйЖШЕїНкЃЈМДЮФзжЩСЖЏЦЕТЪЁЂЙіЖЏЫйЖШЁЂДђзж)ЃЌЯдЪОЫйЖШЕШЁЃЯдЪОВЩгУЖЈЪБЦїжаЖЯЗНЪННјааааЩЈУшЃЌУПДЮжаЖЯЯдЪОвЛааЃЌЖЈЪБжаЖЯЪБМфЮЊ1.25msЃЌетбљећЦСЕФЫЂаТТЪЮЊ50HzЃЌвђЖјЮоЩСЫИИаЁЃЪЕЯжЖЏЬЌЯдЪОЫйЖШЕїНкЕФЗНЗЈЭЈГЃЪЧИФБфЖЈЪБЦїЕФжаЖЯЪБМфЃЌЕЋЪЧЕБЯдЪОЫйЖШКмТ§ЕФЪБКђЃЌИУЗНЗЈШнвзЪЙећЦСЕФЫЂаТТЪНЕЕЭЃЌДгЖјЪЙЯдЪОФкШнГіЯжЩСЫИЁЃвђДЫЃЌБОЩшМЦВЩгУвЛжжЁАШэЖЈЪБЁБЗНЗЈЃЌМДдкГЬађжаУќУћвЛИіБфСПзїЮЊЁАШэЖЈЪБЦїЁБЃЌвдгУРДЩшЖЈСНДЮЖЏЬЌЯдЪОЕФЪБМфМфИєЁЃдкЖдЖЈЪБжаЖЯЕїгУМЦЪ§ЪБЃЌШчЙћЕїгУДЮЪ§ДяЕНЩшЖЈжЕЃЌдђИФБфЯдЪОФкШнЁЃЮЊБЃжЄФмЙЛе§ГЃЯдЪОЃЌЁАШэЖЈЪБЦїЁБЕФЩшЖЈжЕБиаыДѓгкећЦСЯдЪОжмЦкЁЃгЩгкЯдЪОЦСУПааЯдЪО1.25msЃЌећЦСЯдЪОжмЦкЮЊ20msЃЌПМТЧЕНгрСПЕФЧщПіЃЌПЩНЋШэЖЈЪБЦїЕФЩшЖЈжЕЖЈдкДѓгк30msЁЃШчДЫбЛЗМЦЪ§ЃЌМДПЩЪЕЯжЖЏЬЌЯдЪОЁЃЁАШэЖЈЪБЦїЁБЕФЩшЖЈжЕПЩвдЭЈЙ§ЩЯЮЛЛњPCЛњРДИФБфЃЌетбљМШПЩЪЕЯжLEDЖЏЬЌЯдЪОЕФЫйЖШЕїНкЃЌгжПЩБЃГжЯдЪОФкШнЕФСїГЉКЭЮоЩСЫИИаЁЃ
вдЩЯЬсЕНЕФОВЬЌЁЂЩСЖЏЁЂЙіЖЏКЭДђзжЕШ4жжЯдЪОЗНЪНЃЌЪЕМЪЩЯЪЧЕЅЦЌЛњЖЈЪБжаЖЯГЬађНјааааЩЈУшДІРэЕФВЛЭЌЗНЗЈЁЃЯТУцНЋЗжБ№ЫЕУїШчКЮЪЕЯжет4жжЯдЪОЗНЪНЁЃОВЬЌЯдЪОжЛашдкЖЈЪБжаЖЯДІРэГЬађжаДгЯдЪОЛКГхЧјЕїШыЯргІЕФвЛааЯдЪОЪ§ОнЃЌШЛКѓбЁжаИУааМДПЩЪЕЯжИУааЕФЯдЪОЃЌШчДЫбЛЗЃЌБуПЩЯдЪОећИіФкШнЁЃ
ЩСЖЏЯдЪОгыДЫРрЫЦЃЌВЛЭЌЕФЪЧвЊМфИєвЛИіЁАШэЖЈЪБЦїЁБЕФЖЈЪБЪБМфЃЌдкааЩЈУшЪБЃЌаавЦЮЛМФДцЦїЕФDЖЫДђШыЕФЪ§ОнШЋЮЊ0ЃЌПЩЪЙЕУећЦСВЛЯдЪОЃЌвдШЗБЃКкЦСЕФЪБМфгыЯдЪОЕБШЛЪБМфЯрЕШЃЌДгЖјЪЕЯжККзжЛђЭМЗћЕФЩСЖЏЯдЪОЁЃ
ЙіЖЏЯдЪОвЊЧѓашвЊЯдЪОЕФФкШнУПИєвЛЖЈЪБМфЯђжИЖЈЗНЯђетРявдДггвЯђзѓЮЊР§вЦЖЏвЛСаЃЌетбљЯдЪОЦСПЩвдЯдЪОИќЖрЕФФкШнЁЃЮЊДЫЃЌашвЊдкЯТДЮвЦЖЏЯдЪОжЎЧАЖдЯдЪОЛКГхЧјЕФФкШнНјааИќИФЃЌДгЖјЭъГЩЯргІЕуеѓЪ§ОнЕФвЦЮЛВйзїЁЃОпЬхВйзїЗНЗЈЪЧЃКЩшжУвЛИіЯдЪОЛКГхЧјЃЌИУЧјгІАќРЈСНВПЗжЃЌвЛВПЗжгУРДБЃДцЕБЧАLEDЯдЪОЦСЩЯЯдЪОЕФ4ИіККзжЕуеѓЪ§ОнЃЛСэвЛВПЗжЮЊЕуеѓЪ§ОндЄзАдиЧјЃЌгУРДБЃДцМДНЋНјШыLEDЯдЪОЦСЕФ1ИіККзжЕФЕуеѓЪ§ОнЁЃЙіЖЏжИеыЪМжежИЯђЯдЪОЦСЕФзюгвБпдЕуЁЃЕБЙіЖЏжИеывЦЖЏЕНашвЊЯдЪОЕФЕуеѓЪ§ОнДцДЂЧјЕФЕк1ИіККзжЕФЪзЕижЗЪБЃЌФкШнЁЃашвЊзЂвтЕФЪЧЃЌвЊШЗБЃИУВйзїФмдк1.25msЕФжаЖЯЪБМфФкЭъГЩЃЈетРяSTC89C516RD+ВЩгУ24MHzОЇеёЪЕбщжЄУїПЩвдЪЕЯжИУВйзїЃЉЁЃетбљЃЌдквЛИіЩЈУшжмЦкКѓЃЌећИіККзжНЋзѓвЦвЛСаЃЌЖјЯдЪОЛКГхЧјЕФФкШнвВЭЌЪБИќИФЁЃгЩгкдЄзАдиЧјБЃДцСЫ1ИіККзжЕуеѓЪ§ОнЃЌМД16ЁС16ЕуеѓЃЌЫљвдЕБЧАЯдЪОЛКГхЧјЕФФкШнжЛФмвЦЖЏ16СаЁЃЕБЯТвЛИіЙіЖЏЕНРДЪБЃЌЙіЖЏжИеыНЋвЦЖЏЕНЕуеѓЪ§ОнДцДЂЧјЕФЯТвЛИіККзжЕФЪзЕижЗЃЌВЂдкдЄзАдиЧјДцШыИУККзжЕФЕуеѓЪ§ОнЁЃШЛКѓжиИДжДааЩЯЪіВйзїБуПЩЪЕЯжЙіЖЏЯдЪОЁЃЬиЪтзжЗћЛђЭМаЮЕФЯдЪОгыДЫРрЫЦЃЌетРяВЛдйзИЪіЁЃДђзжЯдЪОвЊЧѓККзждкЯдЪОЦСЩЯАДДгзѓЕНгвЕФЫГађвЛИіИіЕФГіЯжЃЌШчЭЌДђзжЕФаЇЙћЁЃЩшМЦЪБПЩВЩгУШчЯТЗНЗЈЃКЪзЯШНЋLEDЯдЪОЦСЖдгІЕФЯдЪОЛКГхЧјШЋВПЧхСуЃЌМДLEDЯдЪОПеАзЃЌШЛКѓУПМфИєвЛИіЁАШэЖЈЪБЦїЁБЩшЖЈЕФЖЏЬЌЯдЪОЪБМфЃЌЯдЪОЛКГхЧјвРДЮМгШывЛИіККзжЕуеѓЪ§ОнВЂНјааЩЈУшЯдЪОЃЌетбљОЭПЩДяЕНДђзжЯдЪОЕФаЇЙћЁЃ
DS1302Т§ЫйГфЕчЪБжгаОЦЌАќРЈЪЕЪБЪБжг/ШеРњКЭ31зжНкЕФОВЬЌRAMЁЃЫќОЙ§вЛИіМђЕЅЕФДЎааНгПкгыЮЂДІРэЦїЭЈаХЁЃЪЕЪБЪБжг/ШеРњЬсЙЉУыЁЂЗжЁЂЪБЁЂШеЁЂжмЁЂдТКЭФъЕШаХЯЂЁЃЖдгкаЁгк31ЬьЕФдТЃЌдТФЉЕФШеЦкздЖЏНјааЕїећЃЌЛЙАќРЈСЫШђФъаЃе§ЕФЙІФмЁЃЪБжгЕФдЫааПЩвдВЩгУ24аЁЪБЛђДјAMЃЈЩЯЮчЃЉ/PMЃЈЯТЮчЃЉЕФ12аЁЪБИёЪНЁЃЪЙгУЭЌВНДЎааЭЈаХЃЌМђЛЏСЫDS1302гыЮЂДІРэЦїЕФЭЈаХЁЃгыЪБжг/RAMЭЈаХНіашШ§ИљЯпЃКЃЈ1ЃЉRSTЃЈИДЮЛЃЉЁЂЃЈ2ЃЉDOЃЈЪ§ОнЯпЃЉКЭЃЈ3ЃЉSCLKЃЈДЎааЪБжгЃЉЁЃЪ§ОнПЩвдвдУПДЮвЛИізжНкЛђЖрДя31зжНкЕФЖрзжНкаЮЪНДЋЫЭжСЪБжг/RAMЛђДгЦфжаЫЭГіЁЃDS 1302ЩшМЦГЩФмдкЗЧГЃЕЭЕФЙІКФЯТЙЄзїЃЌЯћКФаЁгк1ЮЂЭпЕФЙІТЪБуФмБЃДцЪ§ОнКЭЪБжгаХЯЂЁЃ
ДЋИаЦїВПЗжВЩгУУРЙњdallasАыЕМЬхЙЋЫОЕФDS18B20.ЮТЖШВтСПЗЖЮЇЮЊ-55ЁцЁЋ+125ЁцЃЌDS18B20ЪЧвЛжжМЬDS1820жЎКѓаТЭЦГіЕФвЛжжИФНјаЭжЧФмЮТЖШДЋИаЦїЁЃгыДЋЭГЕФШШУєЕчзшЯрБШЃЌЫќФмЙЛжБНгЖСГіБЛВтЕФЮТЖШЁЃDS18B20ЪЧжЇГжЁАвЛЯпзмЯпЁБНгПкЕФЮТЖШДЋИаЦїЃЌЖдDS18B20ЖСГіЛђаДШыаХЯЂНіашвЊвЛЬѕЯпТЗЃЌвђДЫЕчТЗСЌНгМђЕЅЃЌвЛЬѕЯпЩЯПЩЭЌЪБРЉеЙЖрИіДЋИаЦїЃЌвддіМгВтСПЕФзМШЗадЃЌИУДЋИаЦїжЇГж3.0VЁЋ5.5VЕФЕчбЙЗЖЮЇЃЌПЩППадИпЃЌЬхЛ§аЁЃЌИќОМУЃЌИќСщЛюЁЃ
4.2.4 дЖГЬЭЈаХЕчТЗ
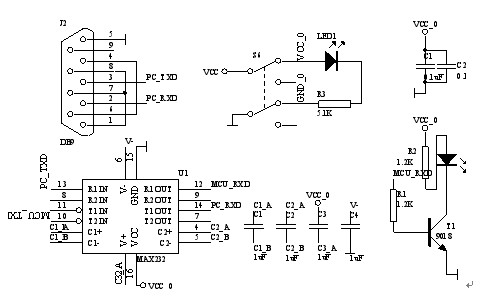
дкДЎааЭЈбЖЪБЃЌвЊЧѓЭЈбЖЫЋЗНЖМВЩгУвЛИіБъзМНгПкЃЌЪЙВЛЭЌ ЕФЩшБИПЩвдЗНБуЕиСЌНгЦ№РДНјааЭЈбЖЁЃ RS-232-CНгПкЃЈгжГЦ EIA RS-232-CЃЉЪЧФПЧАзюГЃгУЕФвЛжжДЎааЭЈбЖНгПкЁЃ
дкRS-232-CжаШЮКЮвЛЬѕаХКХЯпЕФЕчбЙОљЮЊИКТпМЙиЯЕЁЃМДЃКТп МЁА1ЁБЃЌ-5ЁЊ -15VЃЛТпМЁА0ЁБ +5ЁЊ +15V ЁЃдыЩљШнЯоЮЊ2VЁЃМД вЊЧѓНгЪеЦїФмЪЖБ№ЕЭжС+3VЕФаХКХзїЮЊТпМЁА0ЁБЃЌИпЕН-3VЕФаХКХ зїЮЊТпМЁА1ЁБЁЃRS-232-CНгПкСЌНгЦївЛАуЪЙгУаЭКХЮЊDB-25ЕФ25аОВхЭЗзљЃЌЭЈГЃВхЭЗдкDCEЖЫЃЌВхзљдкDTEЖЫЁЃвЛаЉЩшБИгыPCЛњСЌНгЕФRS-232-CНгПкЃЌвђЮЊВЛЪЙгУЖдЗНЕФДЋЫЭПижЦаХКХЃЌжЛашШ§ЬѕНгПкЯпЃЌМДЁАЗЂЫЭЪ§ОнЁБЁЂЁАНгЪеЪ§ОнЁБКЭЁАаХКХЕиЁБЁЃЫљвдВЩгУDB-9ЕФ9аОВхЭЗзљЃЌДЋЪфЯпВЩгУЦСБЮЫЋНЪЯпЁЃ гЩRS-232CБъзМЙцЖЈдкТыдЊЛћБфаЁгк4%ЕФЧщПіЯТЃЌДЋЪфЕчРТГЄЖШгІЮЊ50гЂГпЃЌЦфЪЕетИі4%ЕФТыдЊЛћБфЪЧКмБЃЪиЕФЃЌдкЪЕМЪгІгУжаЃЌдМга99%ЕФгУЛЇЪЧАДТыдЊЛћБф10-20%ЕФЗЖЮЇЙЄзїЕФЃЌЫљвдЪЕМЪЪЙгУжазюДѓОрРыЛсдЖГЌЙ§50гЂГпЁЃЕчТЗдРэШчЭМ11ЫљЪОЃЌЪЙгУRS-232CЕФ4ЁЂ6КЭ1ЁЂ7ЁЂ8ЗжБ№НјааЖЬНгЃЌНЋ2ЁЂ3НХв§ГіЭЈЙ§MAX232ЕчЦНзЊЛЛКѓСЌНгЕНЕЅЦЌЛњЕФДЎПкЃЌдкЭЈаХЕФЪБКђЃЌОЁСПвЊбЁгУЕЭЕФВЈЬиТЪЃЌетбљВЛШнвзГіЯжДэЮѓЃЌЕЅЦЌЛњЕФОЇеёЦЕТЪзюКУбЁгУ11.0592MHZЃЌгаРћгке§ШЗДЋЪфЪ§Он[12]ЁЃ
ЭМ5 дЖГЬЭЈаХЕчТЗ
5 ЯЕЭГШэМўЩшМЦ
5.1 ЯдЪОЦСжїЬхЯдЪО
БОЩшМЦВЩгУLEDЕуеѓЯдЪОЦСЩшМЦЗНАИЃЌГѕВНЪЕЯжСЫдкЭЌвЛЙЋНЛеОХЦЯдЪОВЛЭЌЙЋНЛГЕДЮЃЌвдМАЖЏЬЌКЭОВЬЌЕФЯдЪОЁЃ
ГЬађдкГѕЪМЛЏКѓНЋДцДЂдкROMФкВПЕФеОЕуаХЯЂЖСГіЃЌЫЭжСЕЅЦЌЛњЕФRAMЃЌГѕВНЕФНјааККзжЕуеѓзЊЛЛЃЌзЊЛЛКѓЕФЪ§ОндйОЙ§ЯдЪОаЇЙћДІРэЃЌБШШчеОЕуаХЯЂЕФзѓвЦЯдЪОЁЂгввЦЯдЪОЁЂЩЯЯТвЦЖЏЯдЪОЁЂЙіЖЏЯдЪОЁЂЕШЕШЁЃзюКѓЫЭШыЪ§ОнЛКГхЧјЃЌЕїгУЯдЪОзгГЬађЃЌЭъГЩЙуИцаХЯЂЕФЯдЪОЁЃжїГЬађЕФСїГЬЭМШчЭМ12ЫљЪОЁЃ
ЯдЪОзгГЬађЕФШЮЮёЪЧНЋЛКГхЧјЕФЪ§ОнЖСГіЃЌШЛКѓЫЭЕНЕуеѓЦСЯдЪОЁЃЕуеѓЯдЪОЕФдРэЪЧАДееСаНјаабЁдёЃЌШЛКѓЭЈЙ§ДЎВЂзЊЛЛЃЌНЋвЛСаЕФЯдЪОЪ§ОнЫЭжСбЁдёЕФСаХХЕуеѓжаЃЌШЛКѓбЁдёЯТвЛСаЃЌжиИДетбљЕФВНжшЃЌОЭПЩвдЪЕЯжЪ§ОнЕФЯдЪОЁЃЯдЪОзгГЬађЕФСїГЬЭМШчЭМ13ЫљЪОЁЃ
ЭМ6 жїГЬађСїГЬЭМ ЭМ7 ЯдЪОСїГЬЭМ
5.2 ЯдЪОЦСЯдЪОаЇЙћ
ЯдЪОЬэМгЩЯаЇЙћДІРэКѓЃЌдіЬэСЫЖЏЬЌаЇЙћЃЌФмДяЕНИќКУЕФЯдЪОаЇЙћЁЃжїГЬађдкПЊЪМЕФЪБКђЩшжУвЊЯдЪОЕФаЇЙћЃЌдкЯдЪОаЇЙћзгГЬађжаЃЌГЬађХаЖЯашвЊЯдЪОЕФаЇЙћКѓЕїгУВЛЭЌЕФЯдЪОаЇЙћДІРэГЬађЃЌЖдЛКГхЧјФкЕФЪ§ОнНјаааЇЙћДІРэЃЌзюКѓдйЫЭШыЯдЪОЛКГхЧјЃЌЕШД§ЯдЪОЕїгУЁЃЦфГЬађСїГЬЭМШчЭМ14ЫљЪОЁЃ
ЭМ8 ЯдЪОаЇЙћСїГЬЭМ
5.3 дЖГЬЭЈаХЩшМЦ
дкдЖГЬЭЈаХГЬађжаЕЅЦЌЛњжївЊЭъГЩНгЪеPCЛњЭЈЙ§ДЎПкЗЂЫЭЙ§РДЕФЙЋНЛГЕеОЕуЪ§ОнЁЃВЩгУжаЖЯНгЪеЗНЪНЁЃдкжаЖЯЗўЮёзгГЬађжаЃЌЮЊСЫЧјБ№ЫљНгЪеЕФаХКХЪЧСЊТчаХКХЛЙЪЧзжНкЪ§ЁЂЪЧЪ§ОнЛЙЪЧаЃбщКЭЃЌашвЊЖдНгЪеЕНЕФЪ§ОнНјааБцБ№ЁЃЪзЯШдкжїГЬађПЊЪМжаНјааЩшЖЈЃЌШєНгЪмЕНЕФЪЧ01HЃЌдђХаЖЈЮЊНгЪеСЊТчаХКХЃЛНгЪеЕНЕФЪЧ02HЃЌдђХаЖЈЮЊНгЪеУќСюаХКХЃЛШєНгЪеЕНЕФЪЧ03HЃЌдђХаЖЈЮЊНгЪеЪ§ОнаХКХЃЛНгЪеЕНЕФЪЧ04HЃЌХаЖЈЮЊНгЪеЪ§ОнПЊЪМБъжОаХКХЃЛНгЪеЕН05HЃЌХаЖЈЮЊНсЪјНгЪеЪ§ОнБъжОаХКХ[13]ЁЃ
ГЬађдкГѕЪМЛЏКѓЃЌЪзЯШЕїгУЕЅЦЌЛњФкВПROMЧјДцДЂЕФеОЕуаХЯЂЃЌЕБгадЖГЬЭЈаХЕФЪ§ОнЕНРДЪБКђЃЌЯШНЋНгЪеЕНЕФЪ§ОнЫЭЕНЕЅЦЌЛњФкВПЕФЪ§ОнЛКГхЧјЃЌНјааЪ§ОнБцБ№КЭДІРэжЎКѓЃЌдйЫЭЕНЭтВПЕФE2 ROMжаЃЌНЋетаЉДІРэжЎКѓЃЌдйПЊЪМЕїгУЭтВПДцДЂЦїЕФеОЕуаХЯЂЁЃ
ЕЅЦЌЛњдЖГЬЭЈаХГЬађЕФСїГЬЭМШчЭМ16ЫљЪОЁЃ
ЩшжУSTC89C516RD+ЕФДЎааПкЙЄзїгкЕк3жжЗНЪНЃК9ЮЛвьВНДЋЪфЃЌВЈЬиТЪгЩЖЈЪБЦї1ЕФвчГіТЪОіЖЈЁЃЪ§ОнжЁЙВ12ЮЛЃЌЫФИігУгкЦ№ЭЃКЭУќСюБъжОЮЛЃЌ8ЮЛЪ§ОнЗХдкЫФЮЛБъжОЮЛжЎКѓЃЌНгЪеЪБДцШыRB8ЃЌЗЂЫЭЪБШЁTB8жаЕФжЕЃЌгЩгВМўздЖЏЭъГЩЁЃВЈЬиТЪЩшЖЈЮЊ9600bpsЃЌДЎааПкГѕЪМЛЏКѓЃЌашгавЛИіЪБМфбгГйдйНгЪеЪ§ОнЃЌЪ§ОнНгЪеЭъКѓвВашвЛИіЪБМфбгГйКѓдйзЊШыНгЪезДЬЌЁЃ
дкДЎааЭЈаХRS232ЪеЗЂЦїПижЦЗНУцЃЌЦНЪБжУP1.0ЮЊЕЭЃЌЪЙДЎааПкДІгкеьЬ§зДЬЌЃЌЕБгаДЎаажаЖЯЪБЃЌдђжУP1.0ЮЊИпЃЌЗЂЫЭгІД№аХЯЂЃЌШЛКѓдйжУP1.0ЮЊЕЭНгЪеПижЦжИСюЃЌМЬајБЃГжPl.0ЮЊЕЭЃЌЪЙДЎааЪеЗЂЦїДІгкНгЪезДЬЌЃЌдкетаЉЙ§ГЬжаЃЌЩцМАЪеЁЂЗЂЕШЙІФмзЊЛЛЁЃ
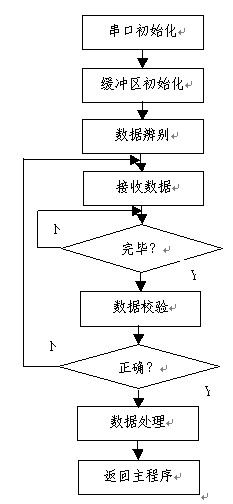
ЭМ9 дЖГЬЭЈаХСїГЬЭМ
6 ЯЕЭГВтЪдНсЙћ
ЯЕЭГдкВтЪдЕФЙ§ГЬжаЃЌгВМўЕчТЗЯрБШНЯИДдгЃЌМгЩЯЖдЕуеѓЕчТЗЕФбаОПВЛЙЛЩюШыЃЌИеПЊЪМЩшМЦЕФЪБКђЃЌзпСЫКмЖрЕФЭфТЗЁЃОЁЙмУЛгаГіЯжДѓЕФвьГЃЧщПіЁЃЕЋдкШэМўЕїЪдЙ§ГЬжаЃЌГіЯжвЛаЉЮЪЬтЃК
ЃЈ1ЃЉЕЅЦЌЛњЪфГіЕФаХКХдкЕуеѓЦСФЛЩЯЯдЪОЮЊТвТыЃЌВЛФме§ШЗЯдЪОзжЗћЃЌЭЈЙ§ЪОВЈЦїЕФИњзйЙлВьЃЌШЗЖЈЮЊЪфШыЫјДцаОЦЌ74SC244аХКХбЁдёЖЫУЛгае§ШЗСЌНгЫљжТЃЌЭЈЙ§НЋЕчТЗаоИФКѓНтОіЮЪЬтЁЃ
ЃЈ2ЃЉаОЦЌБрГЬГіЯжДэЮѓЃЌИќЛЛаОЦЌКѓШдВЛФмНтОіЮЪЬтЃЌОзаЯИВщевКѓЗЂЯжИеПЊЪМбЁгУЕФAT89S52ЕФROMПеМфВЛЙЛЫљжТЃЌЫљЩеаДЕФГЬађДњТывбОГЌЙ§AT89S52ФкВПЕФ4KBЕФROMПеМфЃЌбЁгУКъОЇПЦММЕФSTC89C516RD+ЕЅЦЌЛњВЂЧвЭтМгвЛЦЌAT24C256аОЦЌКѓНтОіЮЪЬтЁЃ
7 НсТл
БОЮФЫљЬжТлЕФПЭГЕЙуИцЦСЕФЩшМЦВЩгУСЫКъОЇПЦММЕФSTC89C516RD+ЕЅЦЌЛњзїЮЊЯЕЭГЕФжабыПижЦЕЅдЊЃЌВЂНсКЯШэМўБрГЬЃЌЪЕЯжЭЌвЛеОЕуВЛЭЌЗНЯђПЭГЕЕФОВЬЌЯдЪОЁЂЖЏЬЌЯдЪОЃЌМђЛЏСЫЯЕЭГВйзїЃЌЗсИЛСЫЯЕЭГЙІФмЃЌЗћКЯЮДРДНЛЭЈжЧФмЛЏЁЂЭјТчЛЏЕФЗЂеЙЗНЯђЁЃ
БОЯЕЭГОЙ§ИФНјКѓЛЙПЩвдгІгУЕНЙуИцаћДЋЕФСьгђЃЌЭЈЙ§дЖГЬЭЈаХЪЕЯжЖдЕуеѓЦСФЛЕФдЖГЬПижЦЁЃдкЭЈаХЭјТчШевцЭъЩЦЁЂЭЈаХЙЄОпШеЧїЦеМАЕФНёЬьЃЌЪЧвЛжжКмжЕЕУЭЦЙуЕФММЪѕЁЃИУЯЕЭГОпгаНЯИпЕФадФмМлИёБШЃЌгЩДЫПЊЗЂГіЕФжЧФмаХЯЂЯдЪОВњЦЗЗћКЯЮДРДжЧФмНЛЭЈЕФЗЂеЙЗНЯђЃЌКмОпЪаГЁЗЂеЙЧБСІЁЃ
жТаЛ
дкБОДЮЬєеНБЩшМЦЙ§ГЬЕБжаЃЌжИЕМРЯЪІедУїИЛКЭЦфЫћРЯЪІвдМАЭЌбЇУЧЖМИјгшСЫКмДѓЕФАяжњжЇГжЃЌедРЯЪІбЯНїЕФжЮбЇЬЌЖШКЭЮёЪЕЕФЧѓжЊОЋЩёИјЮвСєЯТСЫКмЩюЕФгЁЯѓЃЌЫћУЧЙФРјЮвзЮзЮВЛОыЃЌШёвтНјШЁЃЌЬиБ№ЪЧдкРЇФбЕФЪБКђЃЌЫћгавтЪЖЕиХрбјЮвЖРСЂЫМПМКЭНтОіЮЪЬтЕФФмСІЁЃедРЯЪІЕФбЯИёвЊЧѓЃЌСюЮввдКѓЕФЙЄзїКЭЩњЛюЕБжаЪмвцЗЫЧГЁЃдкДЫЃЌЖдЫћУЧЫљИјгшЕФжИЕМКЭАяжњБэЪОзюждаФЕФИааЛЁЃ
ВЮПМЮФЯз
ЃлЃБЃнЭѕКъУё.LEDЕуеѓЯдЪОЦСЧ§ЖЏЗНАИЃлJЃн.КкСњНЕчзгММЪѕЃЌ1999(5):1ЁЋ2ЃЎ
ЃлЃВЃнэѕБЬЯМ.гУЕЅЦЌЛњДЎааПкЪЕЯжЖЏЬЌЩЈУшLEDЯдЪОЃлJЃн.ЕчзгЙЄГЬЪІЃЌ 2006(6)
ЃлЃГЃнРюьфСи.ЬИLEDДѓЦСЕФЫЂаТЦЕТЪКЭЛЛжЁЦЕТЪЃлJЃн.ЯжДњЯдЪОЃЌ 2004(1)
ЃлЃДЃнХгМвГЩ.ЖрЙІФмLEDаХЯЂЯдЪОЦСЕФЩшМЦЃлJЃн.ЯжДњЯдЪОММЪѕЃЌ 2006(9)
ЃлЃЕЃнжмаЁЦН.LEDЯдЪОЦСМАЦфЩЈУшЕчТЗЕФгВМўМАШэМўЪЕЯжЃлJЃн.гЁЫЂЕчТЗаХЯЂЃЌ 2005(1)
ЃлЃЖЃнгнКзЫЩ.LEDЯдЪОЦСИпЫйЪ§ОнЭЈбЖНгПкЩшМЦЃлJЃн. ЙњЭтЕчзгдЊЦїМўЃЌ 2005(2)
ЃлЃЗЃнЙљезе§ЕШ.LEDЕуеѓЯдЪОЦСЯЕЭГЩшМЦЃлJЃн.ВГКЃДѓбЇбЇБЈЃЌ 2005(12)
ЃлЃИЃнКТН№Ие.LEDВњвЕЗжЮіБЈИцЃлJЃн.ЯжДњЯдЪОЃЌ 2006(3)
ЃлЃЙЃнеХаТУљ.ЙЋНЛЮоЯпаХЯЂЙуВЅЯЕЭГЃлJЃн.ГЧЪаЙЋЙВНЛЭЈЃЌ 2003(4)
Ѓл10ЃнЙиЛ§еф.ЯдЪОЗЂеЙМАЦфдкНЛЭЈСьгђЕФгІгУЃлJЃн.ВњвЕЭИЪгЃЌ 2004(6)
Ѓл11ЃнШЮРДЫЋ.ГЕдиLEDДѓЦСФЛЯдЪОЦСЕФЩшМЦРэФюЃлJЃн.жЃжнЙЄвЕИпЕШзЈПЦбЇаЃбЇБЈЃЌ 2004(3)
Ѓл12ЃнНРіьП.жЧФмЙЋНЛЕчзгеОХЦЯдЪОЪБМфдЄВтЗНЗЈбаОПЃлJЃн.НЛЭЈгыМЦЫуЛњЃЌ 2006(10)
Ѓл13ЃнГЃгёСж.КњЦєжо.ГЧЪаЙЋНЛЯпЭјгХЛЏЕФЯпадФЃаЭЃлJЃн.жаЙњЙЋТЗбЇБЈЃЌ 2005(18)
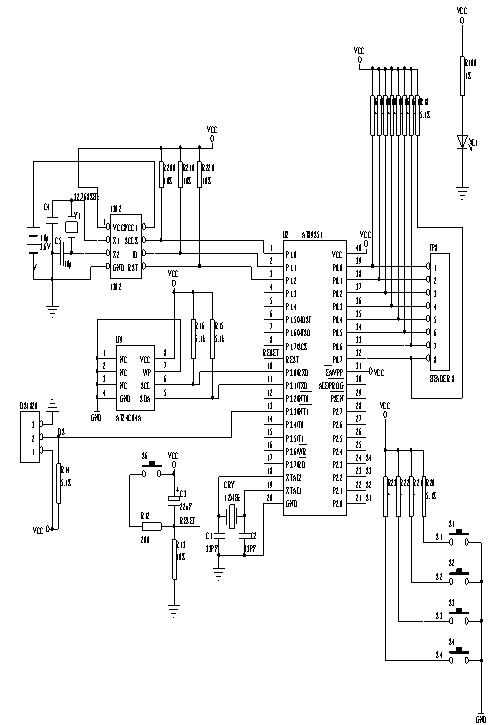
ИНТМ1 ећЬхЕчТЗЭМ
 51/AVRЕЅЦЌЛњММЪѕцфеОЃЁ <
51/AVRЕЅЦЌЛњММЪѕцфеОЃЁ <



 зюаТЦРТл
зюаТЦРТл


 Alexa
Alexa mcusy_cn#126.com (ЧыАб#ИФГЩ@)
mcusy_cn#126.com (ЧыАб#ИФГЩ@)  НЛСїЃК522422171
НЛСїЃК522422171