
����������Գ�������bug�Ժ�,ucos+lwip���ҵ�44b0+8019�������������ܵñȽ��ȶ���.һֻ����lwip��һ�������Ŀ���Դ���tcp/ip Э��ջ,����Լ���lwip����ֲ������д����.������������Ƚ�æ,lwip����ֲҲ������ҵ��ʱ������,����д���˵�һ����(lwip�� process model)��������,����������Ȥ���ٽ�������д.�����ҵ���ֲ�ο���skyeye���ʴ����Ĵ���,��ҿ���ȥ�������ʴ�����lwip��ucos����ֲ�����ºʹ���.
lwIP����ʿ�������ѧԺ��Swedish Institute of Computer Science����Adam Dunkels�ȿ�����һ������Ƕ��ʽϵͳ�Ŀ���Դ����TCP/IPЭ��ջ��Lwip�ȿ�����ֲ������ϵͳ��,�ֿ���
������ϵͳ������¶�������.
LwIP���������£�
(1) ֧�ֶ�����ӿ��µ�IPת��
(2) ֧��ICMPЭ��
(3) ����ʵ������չ�ĵ�UDP���û����ݱ�Э�飩
(4) �����������ƣ�RTT����Ϳ��ٻָ��Ϳ���ת����TCP���������Э�飩
(5) �ṩר�ŵ��ڲ��ص��ӿڣ�Raw API���������Ӧ�ó�������
(6) ��ѡ���Berkeley�ӿ�API�����߳�����£�
(7) �����µİ汾��֧��ppp
(8) �°汾�������˵�IP fragment��֧��.
(9) ֧��DHCPЭ��,��̬����ip��ַ.
�����������µİ汾��V0.6.4
1.lwip�Ľ���ģ��(process model)
tcp/ipЭ��ջ��process modelһ���м��ַ�ʽ.
1.tcp/ipЭ���ÿһ����һ����������.��·����һ������,ip����һ������,tcp����һ������.�����ĺô�������Э
���ÿһ�㶼�dz�����,����ĵ��Ժ����ⶼ�dz�����.�������Ļ������ݿ�㴫��ʱ�������������л�(context switch).
���ڽ���һ��TCP segmentҪ����3��context switch(����������������·�����,����·����̵�ip�����,��ip�����
��TCP����).ͨ�����ڲ���ϵͳ��˵,�����л���Ҫ�˷�ʱ���.��Ƶ��context swich�Dz���ȡ��.
2.����һ�ַ�ʽ��TCP/IPЭ��ջ�ڲ���ϵͳ�ں˵���.Ӧ�ó���ͨ������ϵͳ��ϵͳ����(system call)��Э��ջ������ͨѶ.
����TCP/IP��Э��ջ�������ض��IJ���ϵͳ�ں���.��windows�������ַ�ʽ.
3.lwip��process model:����tcp/ipЭ��ջ����һ�����̵���,����tcp/ipЭ��ջ�ͺͲ���ϵͳ�ں˷ֿ���.��Ӧ�ò����ȿ���
�ǵ����Ľ���Ҳ����פ����tcp/ip������.���Ӧ�ó����ǵ����Ľ��̿���ͨ������ϵͳ������,��Ϣ���еȺ�tcp/ip���̽���ͨѶ. ���Ӧ�ò����פ��tcp/ip������,��Ӧ�ò����������ڲ��ص�������(Raw API)��tcp/ipЭ��ջͨѶ.����ucos��˵���̾���һ��ϵͳ����.lwip��process model��ο���ͼ.��ͼ�п��Կ�������tcp/ipЭ��ջ����ͬһ������(tcpip_thread)��.Ӧ�ò����ȿ����Ƕ���������(��ͼ�е�tftp_thread,tcpecho_thread),Ҳ������tcpip_thread��(��ͼ���Ͻ�)�������ڲ��ص�������(Raw API)��tcp/ipЭ��ջͨѶ

2 Port Lwip to uCos
�������Ŀ�����õ�Ӳ��ƽ̨��s3c44b0x+rtl8019.ucos��44b0�ϵ���ֲ�������кܶ�����dz��꾡�Ľ������ֲ����.�ҾͲ���������.��Ҫ˵����һ����lwip��Ϊÿ���������Ӷ�̬����һЩ�ź���(semaphone)����Ϣ����(Message Queue),�����ӶϿ�ʱ��ɾ����Щsemaphone��Queue.��Ucos-2.0��֧��semaphone��Queue��ɾ��,����Ҫѡ��һЩ�ϸ߰汾��ucos.���õ���ucos-2.51.
2.1 Lwip�IJ���ϵͳ��װ��(operating system.emulation layer)
LwipΪ����Ӧ��ͬ�IJ���ϵͳ,�ڴ�����û��ʹ�ú�ijһ������ϵͳ��ص�ϵͳ���ú����ݽṹ.������lwip�Ͳ���ϵͳ֮��������һ������ϵͳ��װ��.����ϵͳ��װ��Ϊ����ϵͳ����(��ʱ,����ͬ��,��Ϣ����)�ṩ��һ��ͳһ�Ľӿ�.��lwip�н���ͬ��ʹ��semaphone����Ϣ���ݲ��á�mbox��(��ʵ��ucos��ʵ��������ʹ�õ���Message Queue��ʵ��lwip�еġ�mbox��,�����ҿ��Կ�����һ��)
Operating system emulation layer��ԭ�����ڡ�/lwip/src/core/sys.c��.���;���IJ���ϵͳ��صĴ�����../lwip/src/arch/sys_arch.c��.
����ϵͳ��װ�����Ҫ��������:
void sys_init(void)//ϵͳ��ʼ��
sys_thread_t sys_thread_new(void (* function)(void *arg), void *arg,int prio)//����һ���½���
sys_mbox_t sys_mbox_new(void)//����һ������
void sys_mbox_free(sys_mbox_t mbox)//�ͷŲ�ɾ��һ������
void sys_mbox_post(sys_mbox_t mbox, void *data) //����һ����Ϣ������
void sys_mbox_fetch(sys_mbox_t mbox, void **msg)//�ȴ������е���Ϣ
sys_sem_t sys_sem_new(u8_t count)//����һ���ź���
void sys_sem_free(sys_sem_t sem)//�ͷŲ�ɾ��һ���ź���
void sys_sem_signal(sys_sem_t sem)//����һ���ź���
void sys_sem_wait(sys_sem_t sem)//�ȴ�һ���ź���
void sys_timeout(u32_t msecs, sys_timeout_handler h, void *arg)//����һ����ʱ�¼�
void sys_untimeout(sys_timeout_handler h, void *arg)//ɾ��һ����ʱ�¼�
��
���ڲ���ϵͳ��װ�����Ϣ�����Ķ�lwip��docĿ¼�����sys_arch.txt.�ļ�.
2.2 Lwip��ucos�ϵ���ֲ.
2.2.1 ϵͳ��ʼ��
sys_int������tcpipЭ��ջ����tcpip_thread����ǰ������.
#define MAX_QUEUES 20
#define MAX_QUEUE_ENTRIES 20
typedef struct {
OS_EVENT* pQ;//ucos��ָ���¼����ƿ��ָ��
void* pvQEntries[MAX_QUEUE_ENTRIES];//��Ϣ����
//MAX_QUEUE_ENTRIES��Ϣ�����������Ϣ��
} TQ_DESCR, *PQ_DESCR;
typedef PQ_DESCR sys_mbox_t;//�ɼ�lwip�е�mbox��ʵ��ucos����Ϣ����
static char pcQueueMemoryPool[MAX_QUEUES * sizeof(TQ_DESCR) ];
void sys_init(void)
{
u8_t i;
s8_t ucErr;
pQueueMem = OSMemCreate( (void*)pcQueueMemoryPool, MAX_QUEUES, sizeof(TQ_DESCR), &ucErr );//Ϊ��Ϣ���д����ڴ����
//init lwip task prio offset
curr_prio_offset = 0;
//init lwip_timeouts for every lwip task
//��ʼ��lwip��ʱ�¼���,����ʵ�ֲο������½�
for(i=0;i<LWIP_TASK_MAX;i++){
lwip_timeouts[i].next = NULL;
}
}
2.2.2 ����һ����tcp/ip����½���:
lwip�еĽ��̾���ucos�е�����,����һ���½��̵Ĵ�������:
#define LWIP_STK_SIZE 10*1024//��tcp/ip�������Ķ�ջ��С.���Ը��������
//������,44b0����������8M��sdram,�������
//һ��Ҳû�й�ϵ
//max number of lwip tasks
#define LWIP_TASK_MAX 5 //��tcp/ip��ص����������Ŀ
//first prio of lwip tasks
#define LWIP_START_PRIO 5 //��tcp/ip����������ʼ���ȼ�,�ڱ��������ȼ���
//�Դ�(5-9).ע��tcpip_thread������tcp/ip��ؽ�����//Ӧ�������ȼ���ߵ�.�ڱ����о������ȼ�5
//����û���Ҫ������tcp/ip������,��uart�����,
//��Ҫʹ��5-9�����ȼ�
OS_STK LWIP_TASK_STK[LWIP_TASK_MAX][LWIP_STK_SIZE];//��tcp/ip��ؽ���
//�Ķ�ջ��
u8_t curr_prio_offset ;
sys_thread_t sys_thread_new(void (* function)(void *arg), void *arg,int prio)
{
if(curr_prio_offset < LWIP_TASK_MAX){
OSTaskCreate(function,(void*)0x1111, &LWIP_TASK_STK[curr_prio_offset][LWIP_STK_SIZE-1],
LWIP_START_PRIO+curr_prio_offset );
curr_prio_offset++;
return 1;
} else {
// PRINT( lwip task prio out of range ! error! );
}
}
�Ӵ����п��Կ���tcpip_threadӦ�������ȴ�����.
2.2.3 Lwip�еĶ�ʱ�¼�
��tcp/ipЭ���кܶ�ʱ��Ҫ�õ���ʱ,��ʱ��ʵ��Ҳ��tcp/ipЭ��ջ��һ����Ҫ�IJ���.lwip�ж�ʱ�¼������ݽṹ����.
struct sys_timeout {
struct sys_timeout *next;//ָ����һ����ʱ�ṹ
u32_t time;//��ʱʱ��
sys_timeout_handler h;//��ʱʱ�䵽��ִ�еĺ���
void *arg;//��ʱʱ�䵽��ִ�к����IJ���.
};
struct sys_timeouts {
struct sys_timeout *next;
};
struct sys_timeouts lwip_timeouts[LWIP_TASK_MAX];
Lwip�еĶ�ʱ�¼����Ľṹ����ͼ,ÿ����tcp/ip��ص������һϵ�ж�ʱ�¼����һ����������.ÿ����������ʼָ�����lwip_timeouts�Ķ�Ӧ������.
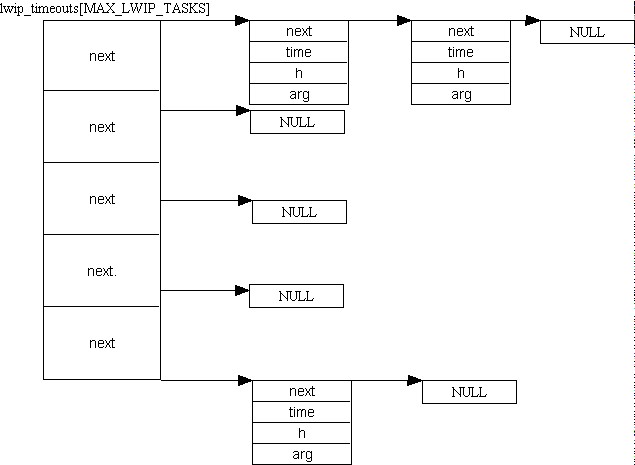
����sys_arch_timeouts���ض�Ӧ�ڵ�ǰ�����ָ��ʱ�¼���������ʼָ��.��ָ�����lwip_timeouts[MAX_LWIP_TASKS]��.
struct sys_timeouts null_timeouts;
struct sys_timeouts * sys_arch_timeouts(void)
{
u8_t curr_prio;
s16_t err,offset;
OS_TCB curr_task_pcb;
null_timeouts.next = NULL;
//��ȡ��ǰ��������ȼ�
err = OSTaskQuery(OS_PRIO_SELF,&curr_task_pcb);
curr_prio = curr_task_pcb.OSTCBPrio;
offset = curr_prio - LWIP_START_PRIO;
//�жϵ�ǰ�������ȼ��Dz���tcp/ip�������,���ȼ�5-9
if(offset < 0 || offset >= LWIP_TASK_MAX)
{
return &null_timeouts;
}
return &lwip_timeouts[offset];
}
ע��:���ʴ�����ֲ�Ĵ����ڱ�������һ��bug.���ʴ�������ֲ�����溯���е�OS_TCB curr_task_tcb�������ȫ�ֱ���,ʹ��������Ϊ��һ���������뺯��.��Ҳ���ڽ������²���ʱ���������bug.�ҵĿ����������õ�ip��ַ��192.168.1.95.����windows��dos����������
ping 192.168.1.95 �Cl 2000 �Ct,������ó���Ϊ2000�����ݱ�����ping����,ͬʱʹ��tftp�ͻ���������192.168.1.95����һ��ʮ���׳���,ͬʱ��ʹ��telnet����192.168.1.95�˿�7(echo�˿�),���ö˿�д������echo����.
������һ��ʱ���Ժ�,��������벻����Ӧ.�ҵ�ʱҲ�Ǿ�����ʱ��ķ����ŷ�������Ϊ�ڵ����ȼ���������ys_arch_timeouts()ʱ�������ȼ������ϸ�д��curr_task_tcb��ֵ,�Ӷ�ʹsys_arch_timeouts���ص�ָ�����,��������ϵͳ����.����sys_timeout����ǰ��������һ����ʱ�¼�:
void sys_timeout(u32_t msecs, sys_timeout_handler h, void *arg)
{
struct sys_timeouts *timeouts;
struct sys_timeout *timeout, *t;
timeout = memp_malloc(MEMP_SYS_TIMEOUT);//Ϊ��ʱ�¼������ڴ�
if (timeout == NULL) {
return;
}
timeout->next = NULL;
timeout->h = h;
timeout->arg = arg;
timeout->time = msecs;
timeouts = sys_arch_timeouts();//���ص�ǰ����ʱ�¼�������ʼָ��
if (timeouts->next == NULL) {//�������Ϊ��ֱ�����Ӹö�ʱ�¼�
timeouts->next = timeout;
return;
}
//���������Ϊ��,�Զ�ʱ�¼���������.ע�ⶨʱ�¼��е�time�洢���DZ��¼�
//ʱ�������ǰһ�¼���ʱ��IJ�ֵ
if (timeouts->next->time > msecs) {
timeouts->next->time -= msecs;
timeout->next = timeouts->next;
timeouts->next = timeout;
} else {
for(t = timeouts->next; t != NULL; t = t->next) {
timeout->time -= t->time;
if (t->next == NULL ||
t->next->time > timeout->time) {
if (t->next != NULL) {
t->next->time -= timeout->time;
}
timeout->next = t->next;
t->next = timeout;
break;
}
}
}
}
����sys_untimeout�ӵ�ǰ����ʱ�¼�������ɾ��һ����ʱ�¼�
void sys_untimeout(sys_timeout_handler h, void *arg)
{
struct sys_timeouts *timeouts;
struct sys_timeout *prev_t, *t;
timeouts = sys_arch_timeouts();//���ص�ǰ����ʱ�¼�������ʼָ��
if (timeouts->next == NULL)//�������Ϊ��ֱ�ӷ���
{
return;
}
//���Ҷ�Ӧ��ʱ�¼�����������ɾ��.
for (t = timeouts->next, prev_t = NULL; t != NULL; prev_t = t, t = t->next)
{
if ((t->h == h) && (t->arg == arg))
{
/* We have a match */
/* Unlink from previous in list */
if (prev_t == NULL)
timeouts->next = t->next;
else
prev_t->next = t->next;
/* If not the last one, add time of this one back to next */
if (t->next != NULL)
t->next->time += t->time;
memp_free(MEMP_SYS_TIMEOUT, t);
return;
}
}
return;
}
2.2.3 ��mbox����ʵ��:
(1)mbox�Ĵ���
sys_mbox_t sys_mbox_new(void)
{
u8_t ucErr;
PQ_DESCR pQDesc;
//����Ϣ�����ڴ�����еõ�һ���ڴ��
pQDesc = OSMemGet( pQueueMem, &ucErr );
if( ucErr == OS_NO_ERR ) {
//����һ����Ϣ����
pQDesc->pQ=OSQCreate(&(pQDesc->pvQEntries[0]), MAX_QUEUE_ENTRIES );
if( pQDesc->pQ != NULL ) {
return pQDesc;
}
}
return SYS_MBOX_NULL;
}
(2)��һ����Ϣ����mbox��
const void * const pvNullPointer = 0xffffffff;
void sys_mbox_post(sys_mbox_t mbox, void *data)
{
INT8U err;
if( !data )
data = (void*)&pvNullPointer;
err= OSQPost( mbox->pQ, data);
}
��ucos��,���OSQPost (OS_EVENT *pevent, void *msg)�е�msg==NULL �᷵��һ��OS_ERR_POST_NULL_PTR����.����lwip�л����sys_mbox_post(mbox,NULL)����һ������Ϣ,�����ڱ������а�NULL���һ������ָ��0xffffffff.
(3)�ӡ�mbox���ж�ȡһ����Ϣ
#define SYS_ARCH_TIMEOUT 0xffffffff
void sys_mbox_fetch(sys_mbox_t mbox, void **msg)
{
u32_t time;
struct sys_timeouts *timeouts;
struct sys_timeout *tmptimeout;
sys_timeout_handler h;
void *arg;
again:
timeouts = sys_arch_timeouts();////���ص�ǰ����ʱ�¼�������ʼָ��
if (!timeouts || !timeouts->next) {//�����ʱ�¼�����Ϊ��
sys_arch_mbox_fetch(mbox, msg, 0);//��ʱ�ȴ���Ϣ
} else {
if (timeouts->next->time > 0) {
//�����ʱ�¼�������Ϊ��,���ҵ�һ����ʱ�¼���time !=0
//����ʱ�ȴ���Ϣ����,��ʱʱ����ڳ�ʱ�¼������е�һ����ʱ�¼���time,
time = sys_arch_mbox_fetch(mbox, msg, timeouts->next->time);
//�ں�������п��Կ���sys_arch_mbox_fetch������ucos�е�OSQPendϵͳ��
//�ô���Ϣ�����ж�ȡ��Ϣ.
//�����mbox����Ϣ���в�Ϊ��,�������̷���,���������������̬.
//��Ҫ�ص�˵������sys_arch_mbox_fetch�ķ���ֵtime:���sys_arch_mbox_fetch
//��Ϊ��ʱ����,time=SYS_ARCH_TIMEOUT,
//���sys_arch_mbox_fetch��Ϊ�յ���Ϣ������,
//time = �յ���Ϣʱ�̵�ʱ��-ִ��sys_arch_mbox_fetchʱ�̵�ʱ��,��λ�Ǻ���
//������ucos���������OSQPendϵͳ���ý�������̬,���յ���Ϣ���¿�ʼִ��
//���ʱ��û�м�¼����,��������Ҫ����ucos��Դ����.(�������ǻῴ��).
} else {
//�����ʱ�¼�������Ϊ��,���ҵ�һ����ʱ�¼���time ==0,��ʾ���¼��Ķ�ʱ
//ʱ�䵽
time = SYS_ARCH_TIMEOUT;
}
if (time == SYS_ARCH_TIMEOUT) {
//һ����ʱ�¼��Ķ�ʱʱ�䵽
tmptimeout = timeouts->next;
timeouts->next = tmptimeout->next;
h = tmptimeout->h;
arg = tmptimeout->arg;
memp_free(MEMP_SYS_TIMEOUT, tmptimeout);
//���ڴ����ͷŸö�ʱ�¼�,��ִ�иö�ʱ�¼��еĺ���
if (h != NULL) {
h(arg);
}
//��Ϊ��ʱ�¼��еĶ�ʱʱ�䵽��������Ϊsys_arch_mbo_fetch��ʱ����ִ�е�
//����,���ر�������ͷ���µȴ�mbox����Ϣ
goto again;
} else {
//���sys_arch_mbox_fetch��ʱ�յ���Ϣ����
//��ˢ�¶�ʱ�¼������ж�ʱ�¼���timeֵ.
if (time <= timeouts->next->time) {
timeouts->next->time -= time;
} else {
timeouts->next->time = 0;
}
}
}
}
u32_t sys_arch_mbox_fetch(sys_mbox_t mbox, void **data, u32_t timeout)
{
u32_t ucErr;
u16_t ucos_timeout;
//�� lwip�� ,timeout�ĵ�λ��ms
// ��ucosII ,timeout �ĵ�λ��timer tick
ucos_timeout = 0;
if(timeout != 0){
ucos_timeout = (timeout )*( OS_TICKS_PER_SEC/1000);
if(ucos_timeout < 1)
ucos_timeout = 1;
else if(ucos_timeout > 65535)
ucos_timeout = 65535;
}
//���data!=NULL�ͷ�����Ϣָ��,
if(data != NULL){
*data = OSQPend( mbox->pQ, (u16_t)ucos_timeout, &ucErr );
}else{
OSQPend(mbox->pQ,(u16_t)ucos_timeout,&ucErr);
}
//��������ucos�е�OSQPendϵͳ����,
//ԭ����void *OSQPend (OS_EVENT *pevent, INT16U timeout, INT8U *err)
// err�ķ���ֵֻ������:�յ���Ϣ�ͷ���OS_NO_ERR,��ʱ��OS_TIMEOUT
//�����Ƚ�err��8λ���ݸı����16λ���� OSQPend(*pevent,timeout, INT16U *err)
//���¶�����OS_TIMEOUT
//��ucos��ԭ��#define OS_TIMEOUT 20
//��Ϊ #define OS_TIMEOUT -1
//err����ֵ������Ҳ�ı���,�����ʱ����OS_TIMEOUT
// ����յ���Ϣ,��OSTCBCur->OSTCBDly�IJ��ִ�������
//if (msg != (void *)0) { /* Did we get a message? */
// OSTCBCur->OSTCBMsg = (void *)0;
// OSTCBCur->OSTCBStat = OS_STAT_RDY;
// OSTCBCur->OSTCBEventPtr = (OS_EVENT *)0;
// *err = OSTCBCur->OSTCBDly;// zhangzs @2003.12.12
// OS_EXIT_CRITICAL();
// return (msg); /* Return message received */
// }
//����ucos��OSTBCur->OSTCBDly�ĺ��������ucos���鼮
if( ucErr == OS_TIMEOUT ) {
timeout = SYS_ARCH_TIMEOUT;
} else {
if(*data == (void*)&pvNullPointer )
*data = NULL;
//��λת��,��ucos tick->ms
timeout = (ucos_timeout -ucErr)*(1000/ OS_TICKS_PER_SEC);
}
return timeout;
}
semaphone��ʵ�ֺ�mbox����,����Ͳ����ظ���.
 51/AVR��Ƭ��������վ�� <
51/AVR��Ƭ��������վ�� <



 ��������
��������


 Alexa
Alexa mcusy_cn#126.com (���#�ij�@)
mcusy_cn#126.com (���#�ij�@)  ������522422171
������522422171