0 引言
由于旋转件不平衡量离心力的影响,在转动时,中心惯性主轴与回转轴线不重合,所以惯性力矩或惯性力偶矩的大小与方向会随着机械运动的循环而产生周期性变化,从而使得整个机械系统产生振动。由于振动对机械设备的工作精度、寿命等有很大影响,甚至可能损坏设备,所以大部分的旋转件需要做动平衡。
多数的动平衡测量系统的工作环境比较恶劣,周围存在很多其他设备,电磁和机械干扰可能同时存在,所以对测量系统的抗干扰性等要求更高。所以对现有测试系统的改造势在必行。提高系统集成度,减小系统复杂度,提高系统运算能力将有效解决上述问题。在此基础上我们采用了基于SOC技术的C8051F单片机作为系统核心。由于速度快,功能丰富,可以实现A/D转换、数字采集、操作控制、LCD模块显示、输出数据、与上位机通讯和高速运算等功能。
1 测试系统构成
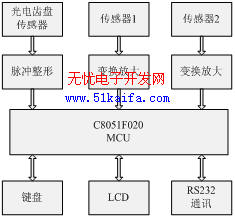
系统一般要采集两种信号,由光电齿盘产生脉冲信号,经过脉冲整形,用来测量被测件的转速与相位,并由此决定A/D采样的时机;由压电传感器产生的压力信号(一般为两路),用来测量振动幅值。两个压电传感器的信号经过压电变换、放大和硬件滤波后,由A/D进行采集。转换后的数字信号由MCU进行计算,解算出振动的幅值和相位,然后通过LCD显示。系统主要功能模块如图1所示。
2 系统硬件设计
MCU采用C8051F020处理器,这是完全集成的混合信号系统级芯片,它既能接收模拟信号又能接受数字信号,其采用CIP-51TM微处理器内核,与8051完全兼容,并且在速度上有显著的提高。完全的工业级设计,抗干扰能力强。芯片内部集成了64KB的FLASH程序存储器,比较器模块,SPI和I2C接口等。片内JTAG调试电路允许使用安装在最终应用系统上的产品MCU进行非侵入式、全速、在系统调试。内部集成12位分辨率的逐次逼近寄存器型ADC,ADC 中集成了跟踪保持电路,速度高,转换速度可达100ksps,完全满足测量精度与速度需要。
2.1 A/D转换电路设计
该A/D转换采用C8051F020内部集成的12位A/D转换器,只需配置好参考电压和时钟信号源即可。由于有8路外路模拟通道,在接外部模拟信号时,应将外部模拟信号相邻通道接地,以免电源毛刺、地电平波动以及交互串扰等影响转换结果。
2.2 显示器与键盘设计
由于C8051F020有着丰富的I/O,可用I/O口数量多达64个,并且中断资源丰富。所以键盘和显示器的连接不用扩展I/O口。键盘采用矩阵式键盘,并选择中断方式。因为LCD的显示内容不实特别多,速度要求不是特别快,所以为方便起见,LCD的控制采用模拟时序的控制方式,仅需要14个I/O口就可以实现并行方式。
3 系统软件设计
动平衡测试系统在实际使用中会遇到各种干扰,包括电气干扰和机械振动干扰。电气干扰一般有工频干扰和尖峰脉冲干扰,机械干扰则包含了各种杂散振动干扰,所以传感器的输出不仅有不平衡量引起的基频振动信号,还含有各种频率成分的干扰信号,所以我们需要采用一定的算法消除干扰信号,提取有用信号。由于C8051F的速度较传统的8051速度快很多,其运算能力提升了近十倍,所以我们可以在不影响显示速度的前提下,采用更复杂、精度更高的算法。
3.1 DFT与FFT算法
FFT算法精度比较高,虽然在速度上较相关分析等算法稍微慢一些,但是由于单片机的速度提升了很多,所以不会影响测量与显示的速度。
由傅立叶分析可知,一个周期信号可以分解为许多不同频率正弦信号之和,即可以将周期信号看成是各次谐波之和。采集到的信号是离散的数字信号,所以需要采用离散傅立叶变换(DFT),进行频谱分析。
设有效采样点序列为:f(0),f(1),f(2)…f(N-1),N为一周采样点数,离散化后的傅立叶变换为:

只需要提取基频分量就可以得到被测件的不平衡量。相位依上述公式算出。
即快速傅立叶变换(FFT),实利用DFT变换的特性,优化运算方法,大大降低了运算的时间复杂度,点数越多,速度提升越明显。所以为了提高运算速度,实际的运算程序采用优化的FFT算法。
 51/AVR单片机技术驿站! <
51/AVR单片机技术驿站! <




 最新评论
最新评论


 Alexa
Alexa mcusy_cn#126.com (请把#改成@)
mcusy_cn#126.com (请把#改成@)  交流:522422171
交流:522422171